静的ポーラーアライメント(SPA)ツール
静的ポーラーアライメントツールには、2つの操作モードがあります。 自動モードには、コンピューター制御下で回転してその位置を報告できるマウントが必要です。 それ以外の場合、手動モードは、ST-4タイプのガイド(「オンカメラ」、GPUSBなど)または手動で制御されるマウントに使用できます。 SPAツールは、マウントの機能に応じて最適なモードを選択します。
自動モード
自動モードでは、PHD2は必要に応じて望遠鏡を回転させ、調整手順を実行します。 これを行うには、PHD2をASCOMまたはINDIインターフェースのいずれかを介してマウントに接続し、マウントを初期化してgo-to(スルー)操作を実行する準備ができている必要があります。 開始するには、次の手順を実行します。
l PHD2をカメラとASCOMまたはINDIマウントドライバーに接続します
l PHD2がこのセットアップのキャリブレーションをすでに行っていることを確認してください
l マウントのRA軸を見かけの極から5度以内に手動で調整し、望遠鏡を回転させてDec = +90または-90に向けます。 ドイツの赤道儀では、カウンターウェイトを下にして、ポールを指すマウントから始めるのが最善です。 星の配置またはプレート解法を使用して、Dec = +90または-90度にできるだけ近づけます。
l アライメントプロセス中、マウントは西に10度回転するため、ビューを妨げたり、スコープの回転を妨げるものがないことを確認してください。
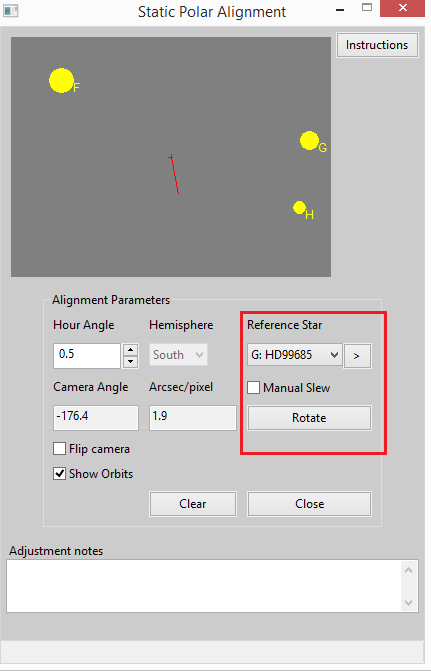
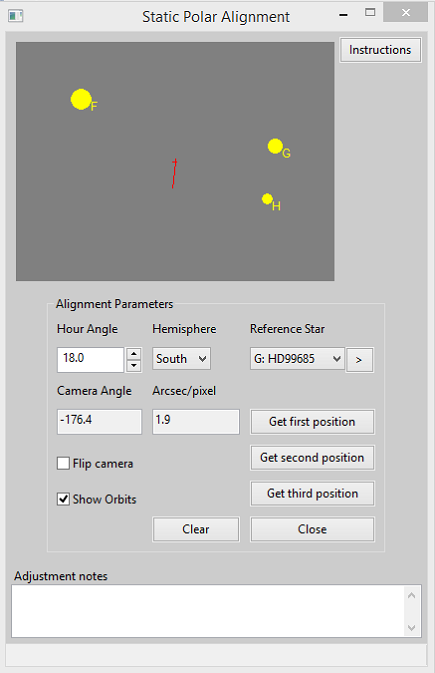
次に、「ツール」/「静的ポーラーアライメント」を使用してSPAツールを開くと、最初のウィンドウが開きます。
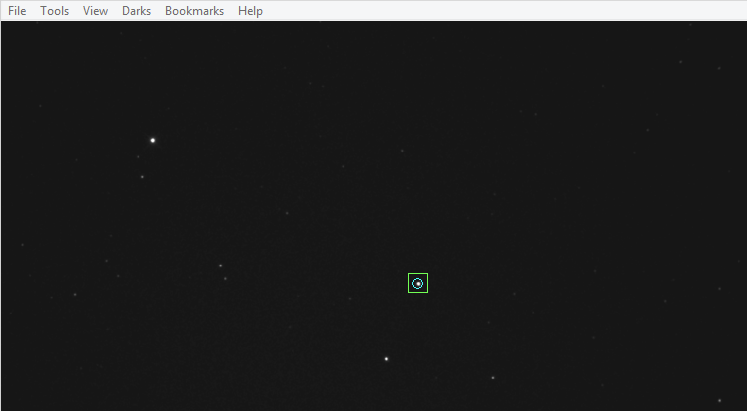
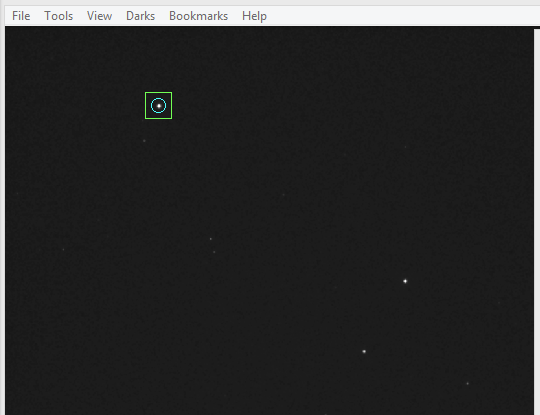
PHD2のメインディスプレイは次のようになります(南極の例)。

SPAウィンドウの上部にあるスターマップは、PHD2のキャリブレーションとマウント位置に従って方向付けられた極星のおよその位置を示しています。 「時角」コントロールを調整するか、「カメラを反転」オプションを使用して、スターマップをメインディスプレイに向けることができます。星図をパンするには、中心にしたいポイントをダブルクリックします。または、[>]ボタンをクリックして、選択した基準星を中央に配置します。
スターマップの右側にあるボタンを使用すると、スターマップの表示とSPAツールの使用手順を切り替えることができます。
[手動スルー]チェックボックスをオンにすることで、手動制御を使用するオプションがあります。手動モードの調整については、以下の説明を参照してください。
スターマップを使用して、メインPHD2ディスプレイで「リファレンススター」を選択します。ドロップダウンリストで、選択した星を識別します。正しく理解できなくても心配はいりません。後で修正できます。
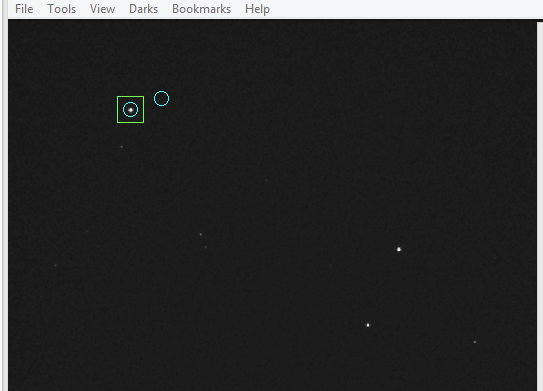
配置を開始する準備ができたら、[回転]をクリックします。現在の位置はメインディスプレイに小さな青い円で示され、座標はステータスバーに表示されます。 「回転」ボタンが「停止」ボタンに変更されていることに注意してください。マウントスルーを終了または停止する場合は、[停止]ボタンをクリックします。
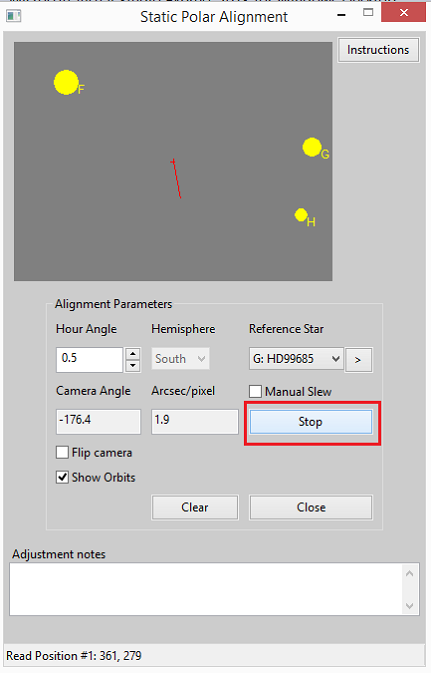
[回転]をクリックすると、ステータスバーに示されるように、マウントがRAで少しずつ西に旋回します。 2つのポイントが記録されると、PHD2のメインディスプレイに位置合わせのグラフィックがオーバーレイされます。
「リファレンススター」を間違えた場合は、ドロップダウンリストから正しいものを選択してください。
次に、ポーラーアライメントオーバーレイの使用の手順に従って、マウントのポーラーアライメントを調整します。
手動モード
主要機能をサポートするマウントドライバーがない場合、またはスコープの回転を手動で制御したい場合は、手動操作モードを使用できます。 開始するには、次の手順を実行します。
l PHD2をカメラとマウントのガイダーインターフェイス(ST-4など)に接続します
l PHD2がこのセットアップのキャリブレーションをすでに行っていることを確認してください
l 見かけの極から5度以内を指すようにRA軸を手動で調整し、望遠鏡を手動でDec = +90または-90を指すように回転させます。 ドイツの赤道儀では、カウンターウェイトを下にして、ポールを指すマウントから始めるのが最善です。 星の配置またはプレート解法を使用して、Dec = +90または-90度にできるだけ近づけます。
l 位置合わせプロセス中は、マウントを西に15度まで回転させる必要があるため、ビューを妨げたり、スコープの回転を妨げるものがないことを確認してください。
次に、「ツール」/「静的ポーラーアライメント」を使用してSPAツールを開くと、最初のウィンドウが開きます。
SPAウィンドウの上部にあるスターマップは、PHD2のキャリブレーションとマウント位置に従って方向付けられた極星のおよその位置を示しています。 「時角」コントロールを調整するか、「カメラを反転」オプションを使用して、スターマップをメインディスプレイに向けることができます。星図をパンするには、中心にしたいポイントをダブルクリックします。または、[>]ボタンをクリックして、選択した基準星を中央に配置します。
スターマップの右側にあるボタンを使用すると、スターマップの表示とSPAツールの使用手順を切り替えることができます。
[手動スルー]チェックボックスをオンにすることで、手動制御を使用するオプションがあります。手動モードの調整については、以下の説明を参照してください。
スターマップを使用して、メインPHD2ディスプレイで「リファレンススター」を選択します。ドロップダウンリストで、選択した星を識別します。正しく修正されなくても心配しないでください。後で修正できます。
準備ができたら、[最初の位置を取得]をクリックします。現在の位置はメインディスプレイに小さな青い円で示され、座標はステータスバーに表示されます。
マウントをRAで西に20分以上旋回します(西に旋回するとRAは減少します)。
メインディスプレイで同じ基準星を選択します。
[2番目の位置を取得]をクリックします。 位置は別の小さな青い円でマークされ、座標はステータスバーに表示されます。
RAでさらに20分以上西に旋回し、同じ星をもう一度選択します。
[3番目の位置を取得]をクリックします。
しばらくすると、配置グラフィックがメインディスプレイに表示されます。 間違えた場合は、ドロップダウンリストから正しい「リファレンススター」を選択します。 同様に、アラインメントポイントのいずれかが疑わしい場合は、マウントを不良ポイントにスルーし、適切なボタンをクリックしてその座標を置き換えます。 東方向に旋回する必要があった場合は、オーバーシュートして最終的に西方向に旋回させてバックラッシュを解消するのが最善です。 または、西に向かって新しい位置に旋回し、悪い点を置き換えます。 ポイントは順番である必要はありません。
修正された配置グラフィックは自動的に更新されます。
次のセクションの指示に従って、マウントのポーラーアライメントを調整してください。
ポーラーアライメントオーバーレイの使用
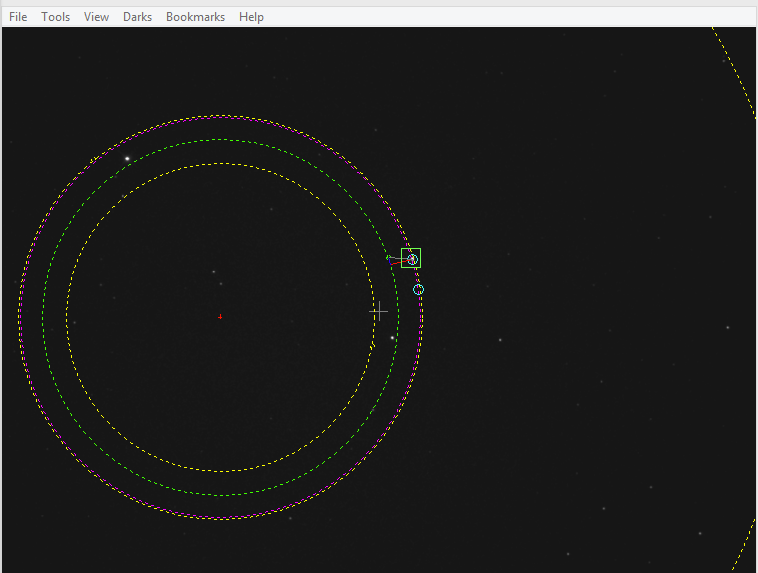
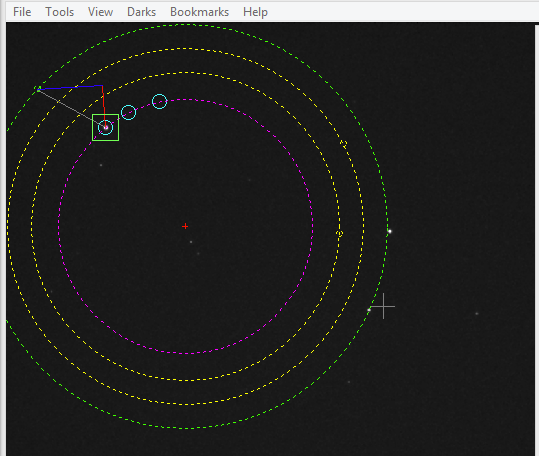
ポーラーアライメントオーバーレイは、十分な位置合わせポイントが収集されると、メインディスプレイに配置されます。
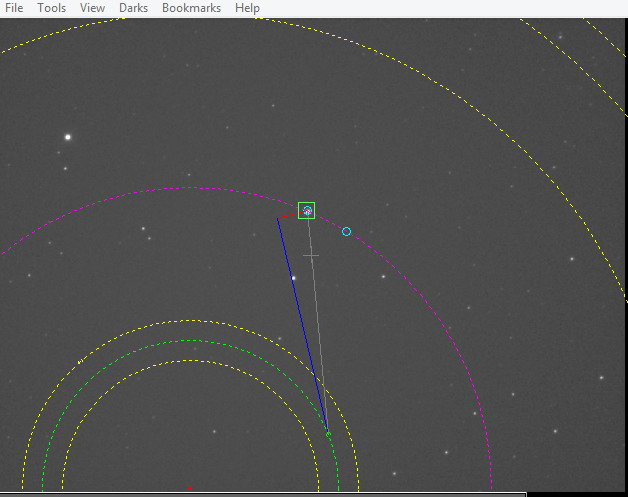
l ディスプレイの中央は灰色の+で示されます。
l 回転の中心は赤い+で示されます。
l マゼンタの円は、基準星がたどった軌道を示しています。
l 極座標が正確な場合、緑の円は参照星の望ましい軌道を示します。
l 黄色の円は、他の基準星の軌道を示しています。
緑と黄色の軌道のそれぞれの中で、小さな円が星の位置を示します。灰色の線は、基準星と緑色の軌道上のターゲットサークルを結びます。これらの位置は、ガイド星が正しく識別されることに依存しています。
青い線は基準星の移動に必要な方位角補正を示し、赤い線は必要な高度補正を示します。
調整線を見やすくするために、[軌道を表示]オプションを使用して軌道を表示または非表示にできます。
標高と方位角のつまみを調整して、基準星をターゲットサークルに移動します。高度を調整すると、基準星が赤い線に沿って移動します。方位角を調整すると、基準星が青い線に沿って移動します。別の方法として、3つの参照星をそれぞれの軌道に配置することができます。これは、手動モードを使用する場合に重要です。
最も正確な位置合わせを行うには、メインディスプレイの星がすべてターゲットサークルから同じ量と方向でオフセットされるまで「時角」を調整します。次に、調整を行います。
確認のために、プロセスをやり直すことができます。大規模な調整を行う必要がある場合は、極領域を中央に保つために赤緯を調整する必要がある場合があります。視界が限られている場合は、マウントを開始位置に戻すこともできます。終了したら、[閉じる]をクリックします。大幅な調整を行った場合は、再調整することをお勧めします。