PHD2ドリフトアライメントツール
PHD2のドリフトアライメントツールを使用すると、赤道儀の正確なポーラアライメントを素早く行うことができます。少し練習が必要ですが、何度行えば、数分で正確な極軸合わせができるようになります。 アライメントには、ガイドスコープとメインスコープ、どちらか使いやすいほうで行ってください。
準 備
l マウントが適度に水平になっていることを確認してください。
l スコープのバランスを確認し、ガイドの準備をします。
l マウントにポーラアライメントスコープがある場合は、それを使ってマウントの極軸を大まかに合わせてみてください。そうでない場合は、マウントの極軸が北極を向いていること、高度設定が住まいの地域の緯度に対応していることを確認してください。
l マウントにの前に立ったときに、パソコンの画面が見えるかどうか確認してください。
l PHD2を起動し、機器を接続します。
l PHD2の最新版を使用する必要があります。
l ここで説明する内容は、マウントへの ASCOM 接続があることを前提としているため、PHD2 はスコープが指している場所を認識しています。 ASCOM 接続がなくてもドリフトアライメントできます。 ASCOMに関する注意事項 を参照してください。
l 赤緯=0から20度以内のガイド星でキャリブレーションを行うか、ASCOMまたはIndiマウントに接続している場合は、正確なキャリブレーションを再ロードしてください。 キャリブレーションが、アライメントを行う予定の架台の側面に対して正しいことを確認してください。 「On-camera」ガイドインターフェースを使用している場合は、アライメントを行う予定の架台の側面から新しいキャリブレーションを実行します。 キャリブレーションが現在の架台に対して正しいものでない場合、ドリフトの方向が変わり、以前に作成した方向に関するメモが正しくなくなります。
l PHD2の設定で、ガイドスコープの焦点距離とガイドカメラのピクセルサイズが正しい値であることを確認してください。( 頭脳ボタン ⇒ 全体タブで焦点距離、カメラタブでピクセルサイズ)
これでドリフトアライメントの準備が整いました。
方位角アライメント
ドリフトアラインツールを開きます。
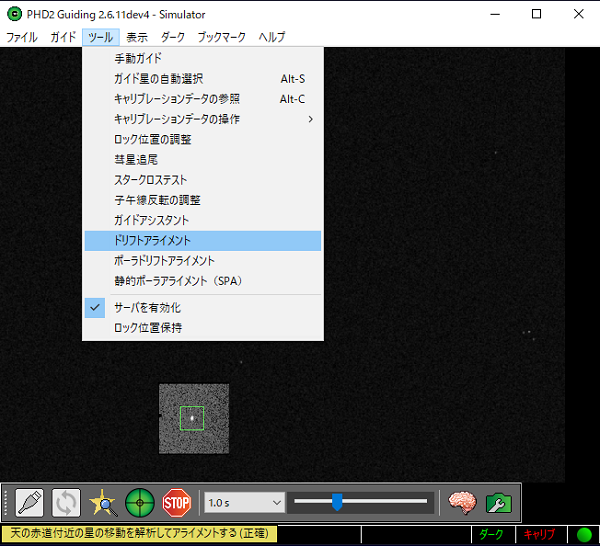
次のような画面が表示されます。
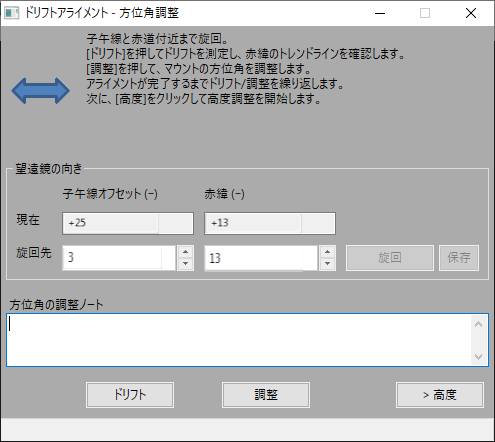
方位軸を調整するためにスコープの位置を決めます。子午線と天の赤道付近をポイントします。「旋回」 ボタンをクリックするか、マウントを手動で動かすことができます。 スコープが次のような方向を向いているはずです。

そして、「ドリフトアライメント」画面は次のように表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
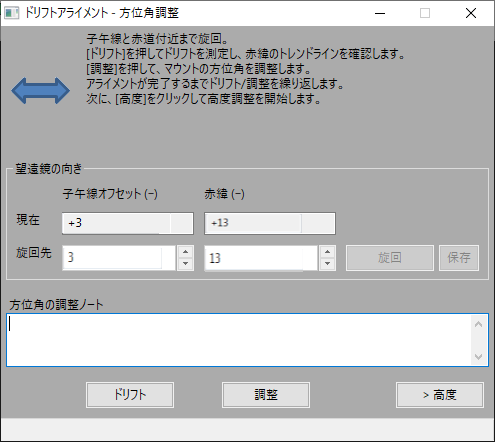
子午線からわずか数度離れており (「子午線オフセット」)、赤道に近い (赤緯の値が小さい) ことに注意してください。
誤差の測定「ドリフト」とマウントの調整「調整」を交互に行うことになります。赤緯ドリフトの割合がアライメント誤差の大きさを示します。調整するたびに誤差は小さくなり、誤差をゼロに近づけるために必要な回数だけ、この作業を繰り返します。
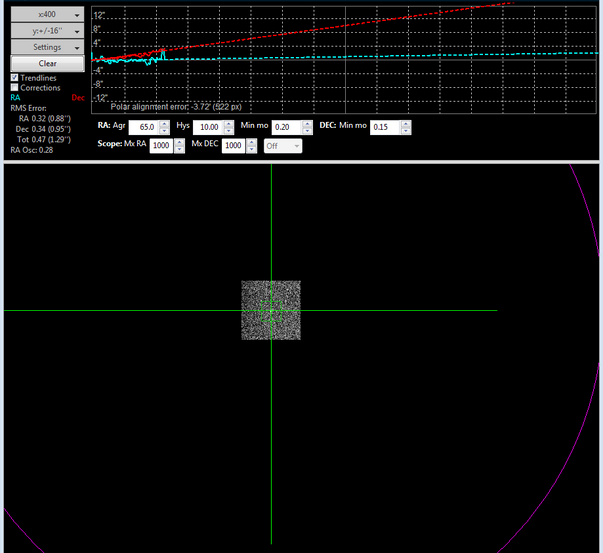
「ドリフト」をクリックすると、赤緯ドリフトの計測が開始されます。PHD2がガイド星を選択し、ガイドを開始します。しばらくすると次のような表示になるはずです。
特に赤緯の傾向線(赤)に注目してください。最初は、赤緯の傾向線が上下に飛び跳ねますが、すぐにノイズが平均化され、ラインの傾きがある程度安定してきます。そうなれば、マウントの方位角を調整する準備が整ったことになります。
私たちの目標は、赤緯の傾向線を "平坦" にすることです。 マウントの方位を調整すると、赤緯の傾向線の傾きが変わります。
方位角を初めて調整する場合は、東と西のどちらに向かえばいいのかわからないでしょう。 PHD2 もわからないので、推測するだけで、五分五分の確率で正しい結果が得られます。 正しく選択すると、新しいドリフトラインはより平坦になります (勾配が緩くなり、水平に近づきます)。選択を誤ると、ドリフトレートが増加します (上記の例では、より急激に下向きになります)。
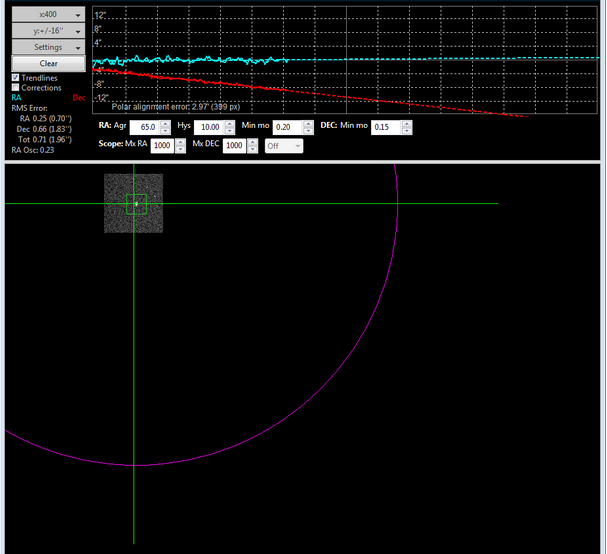
「調整」ボタンをクリックします。PHD2がガイドを停止するので、調整を行うことができます。次のような表示が出ます。
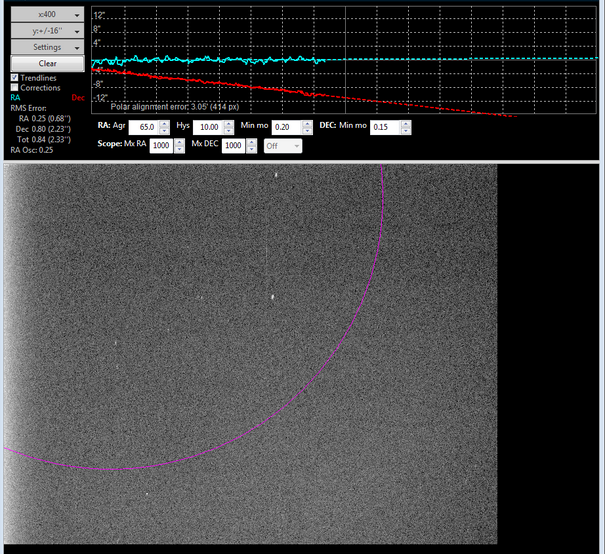
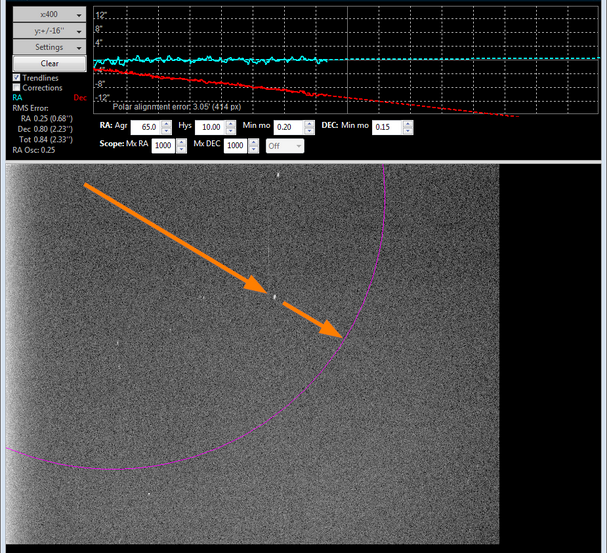
マウントの方位角調整をゆっくりと回し、画面を見ながらガイド星をマゼンタの円に向かって動かします。 マゼンタの円は、ガイド星がどれだけ移動する必要があるかを示しています。 マゼンタの円は、赤緯の傾斜が急なほど大きくなり、最初は大きすぎて画面に表示されない場合があります。 これは当然のことです。 表示されていない場合は、ガイド星を画面の幅に合わせて移動します。 マゼンタの円が表示されている場合は、次のようにガイド星を円に移動する必要があります。
ガイド星を移動させた後、「ドリフト」をクリックして再度計測を行います。 「ドリフト」をクリックする前に、マウントを動かして星の中心を変えたり、別の星を探したり、子午線に近づけたりしてもかまいません。 また、ガイド星をクリックして自分で選ぶこともできますし、PHD2に選ばせることもできます。
しばらく漂うと、また赤緯のトレンドラインができます。良くなった(水平に近づいた)か、悪くなった(水平から離れた)か?「方位角の調整ノート」に、どのように方位角を調整し、赤緯の傾きがどの方向に移動したかを自分で記録しておきます。この情報は、次回ドリフトアライメントを行う際に、方位角調整の方向を推測することなく使用することができます。 例えば、私のセットアップでは、方位角のノブを時計回りに回すと傾きが小さくなります。このメモがあることで、「方位角のノブを反時計回りに回すと傾斜が上がるんだ」ということがわかるんです。
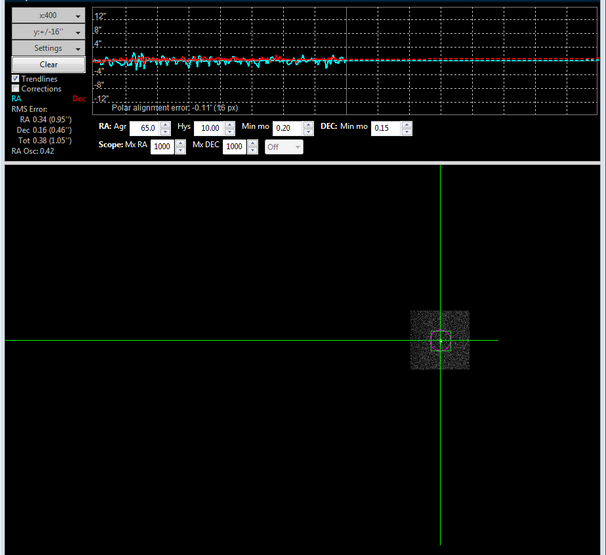
次のように、平らな水平方向の赤緯トレンドラインが得られるまで、マウントの測定と調整を繰り返します。
高度アライメント
次に、マウントの高度を調整するために、この手順を繰り返す必要があります。 「>高度」ボタンをクリックすると、ドリフトツールは次のように表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
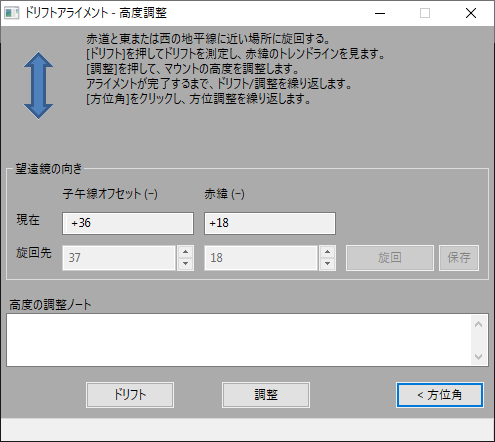
「旋回」をクリックするか、手動でマウントを水平線(東または西)に向けて旋回させます。

正確な位置は重要ではありませんが、水平線から23~35度の位置が効果的です。
「ドリフト」をクリックするとドリフトが開始します。
赤緯の傾斜が安定するまでドリフトします。 「調整」をクリックし、マウントの高度調整ノブを回します。 前の項の「高度の調整ノート」に記録されたメモを使用して、ノブをどの方向に回してスロープを目的の方向に移動するかを決定します。 たとえば、私のセットアップでは、高度ノブを時計回りに回して傾斜を「下」にします。
方位角の調整と同様に、ドリフトと調整を繰り返し、測定してガイド星をマゼンタの円に移動させます。ここでも目標は、ドリフトラインを水平にすることです。
ブックマークの使用
ドリフトアライメントに慣れるまでは、「調整」という作業が少し面倒に感じるかもしれません。 最初は、マウントのノブをどのように調整すれば、"どの程度"、"どの方向 "に効果があるのかを判断する必要があります。 そこで、PHD2のドリフトアライメントツールでは、「ブックマーク 」に対応しています。 これは、調整前と調整後のガイド星の位置を記録するのに便利な方法です。 ブックマークは、「ブックマーク」メニュー、またはキーボードショートカットを使って、以下のようにアクセスします。
l b : ブックマークの切り替え/表示。
l Shift-B : 現在のガイド星の位置(「ロック位置のブックマーク」)にブックマークを設定する。
l Ctrl-B : 全て削除。
l Ctrlキーを押しながら画像のどこかをクリック:その位置にブックマークを設定する、または既にあるブックマークを削除する。
マウント調整をする前にブックマークを設定しておくと、調整によってガイド枠上の星がどのように移動したかを明確に把握することができます。
ASCOMに関する注意事項
上記の説明とスクリーンショットは、マウントにASCOMまたはINDIを接続しているPHD2で表示されるものに対応しています。 これらの接続がない場合は、いくつかの違いがあります。
l スコープ位置データおよび旋回機能は利用できませんので、自身でスコープを旋回させる必要があります。 目標高度や方位角はあくまで目安であり、特に精度にこだわる必要はありません。
l マゼンタの実線の円は破線のマゼンタの円になります。マゼンタの破線の円は、ガイド星の移動距離の制限を表しており、正確な距離ではありません。私たちは、星が円を越えて動いてはいけないということだけを知っています。円まで星を移動させるのではなく、最初の推測として、半分くらいまで移動させるのがよいでしょう。 ブックマークを使えば、ドリフト/調整の各反復でガイド星がどこにあったかを記録しておくことができます。
静的ポーラアライメント(SPA)ツール
静的ポーラアライメントツールには、2つの動作モードがあります。自動化モードでは、コンピュータ制御で旋回し、その位置を報告できるマウントが必要です。それ以外の手動モードは、ST-4タイプのガイド(「On-camera」、GPUSBなど)または手動で制御されるマウントで利用できます。SPAツールは、マウントの能力に応じて最も適切なモードを選択します。
自動化モード
自動化モードでは、PHD2はアライメント手順の実行に必要な望遠鏡の旋回を行います。これを行うには、PHD2をASCOMまたはINDIインターフェースでマウントに接続し、マウントを初期化し、 Go-to(スルーイング)操作を行う準備ができている必要があります。開始するには、次の手順を実行します。
l PHD2をカメラに接続し、ASCOMまたはINDIマウントドライバに接続します。
l PHD2がこの設定のためのキャリブレーションをすでに行っていることを確認する。
l マウントの赤経を見かけの極から5度以内になるように手動で調整し、赤緯 = +90または-90になるように望遠鏡を旋回させます。ドイツ赤道儀の場合、マウントを下げた状態で北極に向けた状態から始めるとよいでしょう。スターアライメントやプレートソルブを使用して、赤緯 = +90または-90°にできるだけ近づけます。
l アライメント中はマウントが西に10度回転しますので、視界を遮るものやスコープの回転を邪魔するものがないことを確認してください。
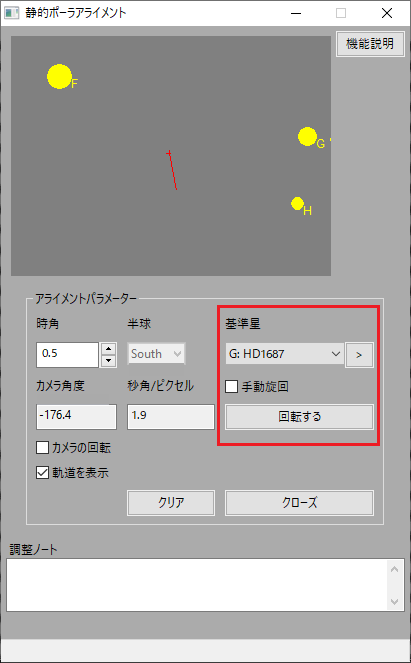
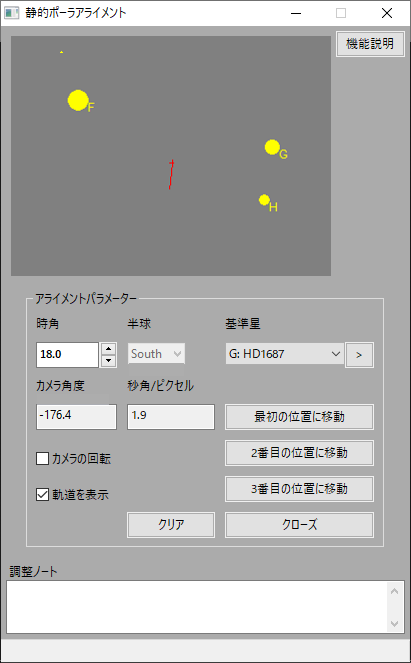
次に、ツール / 静的ポーラアライメントからSPAツールを開くと、最初の画面が開きます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
PHD2のメイン画面は次のようになります(南極の例)。

SPA 画面の上部にある星図は、PHD2 のキャリブレーションとマウントの位置に合わせて、北極星のおおよその位置が表示されます。「時角」を調整するか、「カメラの回転」オプションを使用して、星図をメイン画面の方向に向けることができます。星図をパンするには、中心にしたい点をダブルクリックするか、「>」ボタンをクリックして選択した基準星を中心にすることができます。
星図の右のボタンで、星図の表示とSPAツールの機能説明の表示を切り替えることができます。
「手動旋回」チェックボックスにチェックを入れることで、手動制御を使用するオプションがあります。手動モードでのアライメントについては、以下の説明を参照してください。
星図を使い、PHD2のメイン画面で「基準星」を選択します。どの星を選択したかは、ドロップダウンリストで確認してください。正しく選択できなくても、後で修正できますので安心してください。
アライメントを開始する準備ができたら、「回転する」をクリックします。現在の位置はメイン画面に小さな青い円で表示され、ステータスバーには座標が表示されます。「回転する」ボタンが 「停止」ボタンに変更されていることに注意してください。マウントの旋回を終了または停止したい場合は、「停止」ボタンをクリックします。
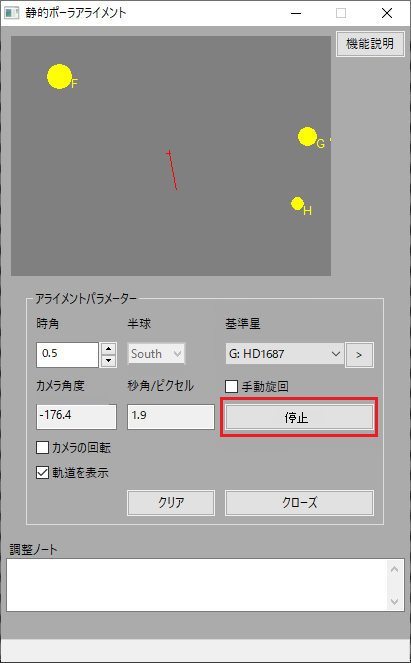

「回転する」をクリックすると、ステータスバーに表示されるように、マウントは赤経で西に旋回するようになります。2点を記録すると、アライメントグラフがPHD2メイン画面にオーバーレイ表示されます。
「基準星」を間違えてしまった場合は、ドロップダウンリストで正しいものを選択してください。
次に、ポーラアライメントオーバーレイの使用 の説明に従って、マウントのポーラアライメントを調整します。
手動モード
Go-toをサポートするマウントドライバをお持ちでない場合や、スコープの旋回を手動で制御したい場合は、手動モードを使用することができます。開始するには、次の手順を実行します。
l PHD2をカメラとマウントのガイダーインターフェース(ST-4など)に接続します。
l PHD2がこの設定のためのキャリブレーションをすでに行っていることを確認する。
l 赤経を見かけの極から5度以内を指すように手動で調整し、赤緯 = +90または-90を指すように手動で望遠鏡を回転させる。ドイツ赤道儀の場合は、カウンターウェイトを下げた状態で、北極を指すようにするのがよいでしょう。スターアライメントやプレートソルブで、赤緯 = +90または-90°にできるだけ近づけるようにします。
l アライメント作業では、マウントを西に15度まで回転させる必要があるので、視界を遮るものやスコープの回転を妨げるものがないことを確認してください。
次に、ツール / 静的ポーラアライメントからSPAツールを開くと、最初のウィンドウが開きます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
SPA 画面の上部にある星図は、PHD2 のキャリブレーションとマウントの位置に合わせて、北極星のおおよその位置が表示されます。「時角」を調整するか、「カメラの回転」オプションを使用して、星図をメイン画面に表示することができます。星図をパンするには、中心にしたい点をダブルクリックするか、「>」ボタンをクリックして選択した基準星を中心にすることができます。
星図の右のボタンで、星図の表示とSPAツールの「機能説明」の表示を切り替えることができます。
「手動旋回」チェックボックスにチェックを入れることで、手動制御を使用するオプションがあります。手動モードでのアライメントについては、以下の説明を参照してください。
星図を使い、PHD2のメイン画面で「基準星」を選択します。選択した星がどの星なのか、ドロップダウンリストを使って確認します。正しく選択できなくても、後で修正できますのでご安心ください。
準備ができたら、「最初の位置に移動」をクリックします。現在位置はメイン画面に小さな青い丸で表示され、ステータスバーには座標が表示されます。

マウントを赤経で20 分間以上 西に移動します (西に移動すると、赤経は減少します)。
メイン画面で同じ基準星を選択します。
「2番目の位置に移動」をクリックします。その位置には別の小さな青い円が表示され、ステータスバーに座標が表示されます。

赤経でさらに20分以上 西に移動し、同じ星を再度選択します。
「3番目の位置に移動」をクリックします。
しばらくすると、アライメントグラフがメイン画面にオーバーレイ表示されます。間違っていた場合は、ドロップダウンリストで正しい「基準星」を選択します。同様に、アラインメントの位置が疑わしい場合は、マウントを悪い位置まで旋回させ、適切なボタンをクリックして、その座標を置き換えます。東に旋回する必要がある場合は、オーバーシュートして西に旋回させ、バックラッシュを解消するのがベストです。または、西に移動して新しい位置に移動し、悪いポイントを置き換えます。位置は順番通りである必要はありません。
修正されたアライメントグラフは自動的に更新されます。
次項の説明に従って、マウントのポーラアライメントを調整します。
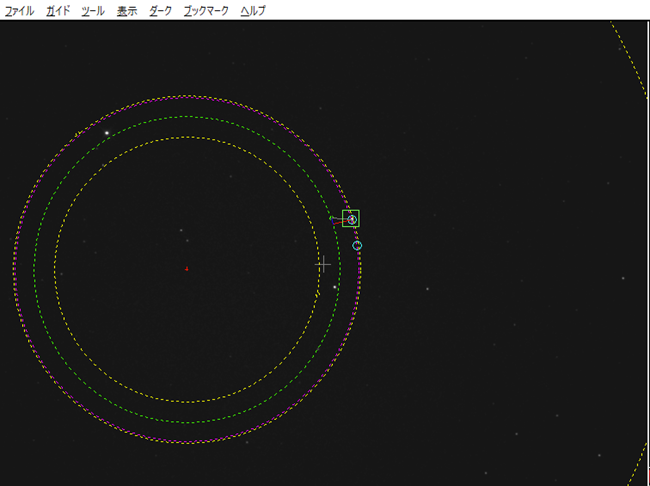
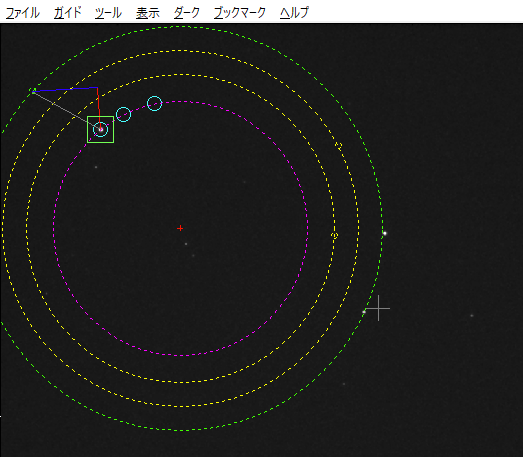
ポーラアライメントオーバーレイは、十分なアライメントポイントが収集されると、メイン画面に表示されます。
l 画面の中央はグレーの + で表示されます。
l 回転中心は赤い + で表示されます。
l マゼンタの円は、基準星がたどる軌道を示します。
l 緑色の円は、ポーラアライメントが正確に行われた場合に、基準となる星の望ましい軌道を示します。
l 黄色い円は他の基準星の軌道を示します。
緑と黄色の各軌道の中で、小さな円は星が位置する場所を示しています。グレーの線は、基準星と緑色の軌道上の目標円とを結んでいます。これらの位置は、ガイド星が正しく認識されているかどうかで決まります。
青線は基準星を移動させるために必要な方位補正、赤線は必要な高度補正を表しています。
調整線を見やすくするために、「軌道を表示」オプションで軌道の表示/非表示を切り替えることができます。
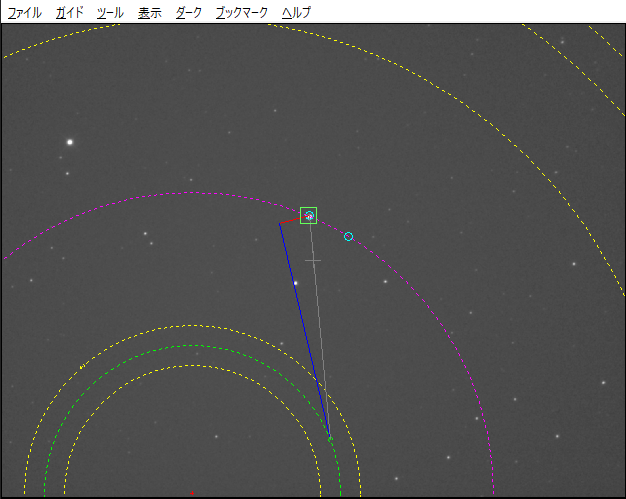
高度と方位角のノブを調整して、基準星を目標円に移動させます。高度を調整すると、赤い線に沿って基準星を移動させることができます。方位角で調整すると、基準星は青い線に沿って移動します。別の方法として、3つの基準星をそれぞれの軌道上に配置することができます。これは、手動モードを使用する場合に重要です。
最も正確なアライメントを得るには、メイン画面上の星がすべて目標円から同じ量と方向にずれるまで 「時角」を調整します。その後、調整を行います。
確認する場合は、やり直しが可能です。大きく調整した場合は、極域の中心を保つために赤緯の調整が必要な場合があります。また、視界が狭い場合は、マウントを開始位置に戻した方がよいかもしれません。終了したら、「クローズ」をクリックします。大きな調整をした場合は、再度キャリブレーションを行う必要があります。
ポーラドリフトアライメントツール
ポーラドリフトアライメントツールは、オリジナルのドリフトアライメントツールと同様の原理で作動します。違いは、方位角と高度に必要な調整を同時に計算するために、天球儀の近くでドリフトを測定することです。ただし、ドリフト星の北極からの距離が長くなるにつれて精度が落ちます。また、調整が落ち着くまで時間がかかることもあるので、静的ポーラアライメントの方が早い場合もあります。ポーラドリフトアライメントの主な利点は、任意の星を選択できること、ツールはどの半球にいるかを知る必要があること、最初にPHD2をキャリブレーションする必要がないことです。
はじめに、以下の手順を実行してください。
l PHD2をカメラに接続する。
l マウントの赤経を見かけの極から5度以内になるように手動で調整し、赤緯 = +90または-90になるように望遠鏡を回転させる。ドイツ赤道儀の場合は、カウンターウェイトを下げた状態で、極に向けることから始めるとよいでしょう。
l 半球が正しく認識されているか確認し、必要であれば調整すること。
l オフアキシスガイダー (OAG) のガイドカメラなど、カメラ画像がミラーリングされている場合は、「鏡像」にチェックを入れます。
l メイン画面で適切なガイド星を選択する。
「スタート」ボタンをクリックすると、ドリフトが始まります。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)

すぐにメイン画面に赤い線が表示されるのがわかると思います。これは、ドリフトを最小限に抑えるためにガイド星に必要な調整を示しています。最初のうちは、安定した調整に落ち着くまで、大きく動き回ります。
落ち着いたら、「停止」ボタンをクリックします。調整内容はメイン画面に表示されたままになります。
高度と方位角のつまみを調節して、ガイド星を赤線の先の赤丸に移動させます。
