モニタリングツール
PHD2には、ガイダーのパフォーマンスを確認するための多数のモニターおよび表示ツールがあります。 これらのツールはすべて「表示」プルダウンメニューでアクセスできます。
l オーバーレイ
l グラフ表示
l 統計情報表示
l AOグラフ
オーバーレイ
最も簡単な表示ツールは、メインのガイダー表示ウィンドウに重ねて表示されるグリッドオーバーレイです。 これらは非常に簡単で、次のような選択肢があります。
l 標的眼(Bullseye)
l 細かい格子
l 粗い格子
l 赤経/赤緯 - 望遠鏡の軸がカメラセンサーの軸に対してどのようにアライメントされているかを示しています。これは、カメラの軸を赤経と赤緯に合わせようと心配する必要がないこと、またそのメリットがあることを視覚的に確認するものです。
l 分光器用スリット/スリット位置 - 分光器のユーザーのために、これはメイン表示画面に分光器用スリットグラフをオーバーレイします。 グラフのサイズ、位置、角度は、光学構成に合わせて調整することができます。
l オーバーレイ表示なし
「表示」メニューの下にあるさまざまなオーバーレイオプションをクリックして、適切なものを選択するだけです。
グラフ表示
グラフ表示画面は、ガイドのパフォーマンスを判断するための強力なツールの 1つです。 典型的な例を以下に示します。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

画面の主要部分には、各ガイド露出におけるガイド星の詳細な変位が、左から右へプロットされて表示されます。 通常、1行目は赤経の変位、2行目は赤緯の変位を表示します。 ただし、お好みでグラフの左側にある「設定」ボタンを使って、カメラ(dX/dY)軸に切り替えることができます(ただし、推奨はしません)。 また、「設定」ボタンを使って、表示単位を秒角とカメラピクセルに切り替えたり、2つのグラフの線の色を変更したりすることも可能です。縦軸の範囲は上から2番目のボタンで制御され、この例では「y:+/-4」とラベル付けされています。 横軸の範囲(プロットされるガイド露出の数)は、一番上のボタンで制御され、この例では「x:50」とラベル付けされています。 この調整は、グラフ画面の左下に表示される統計値を計算するために使用するサンプルサイズも制御します。 これらの値は、各軸の動作の二乗平均平方根(RMSまたは標準偏差)と、両軸の合計を示します。これらは、星の大きさやシーイングコンディションと直接比較することができるため、ガイド性能を推定するのに最適な情報となります。「赤経 Osc」は、現在の赤経が直前の赤経と逆方向である確率を示す値です。 これは、オリジナルのPHDソフトウェアから引き継がれた統計値で、その有用性は限られています。 常に0.5を超える場合は、最小移動量の値が低すぎるため、シーイングを追いかけている可能性があります。 左側には、ガイドの性能を評価するのに役立つ他の2つのチェックボックスがあります。「修正量」ボックスをクリックすると、ガイドコマンドが実際にマウントに送信されたタイミングと、その方向と大きさがオーバーレイで表示されます。 この例では、横軸に不規則に現れる赤と緑の縦線として表示されています。 最適な条件下では、赤緯のガイドコマンドをまったく送信しない間隔が長くなることが予想されます。もう一つのチェックボックスは「トレンドライン」と名付けられ、両軸にトレンドラインを重ね合わせ、星の位置に一貫した全体的なドリフトがあるかどうかを表示することができます。 これは主に、赤緯トレンドラインが多用されるドリフトアライメントに有効です。 しかし、赤経のトレンドラインは、マウントが系統的に遅いか速いか(またはたわみの影響を受けているか)を示すことができ、カスタムトラッキングレートを設定しようとしている場合に役立つことがあります。 また、赤緯のトレンドラインは、単一方向の赤緯ガイドの正しい方向を選択しようとしている場合に役立ちます。外部の画像処理アプリケーションからディザリングコマンドが発行されると、適切な時間間隔でグラフ上に「ディザリング」ラベルが表示されます。 これは、グラフ化された星の変位がディザリング操作の影響を受けていることを示すものです。 RMS統計には、ディザリングと整定に伴う大きな変動は含まれていません。
赤緯が上方へドリフトしている => 赤緯ガイドモード=南を選択
赤緯が下に流れている=>赤緯ガイドモード=北を選択
マウントやハードウェアの様々な理由により、これらの方向は、特に赤緯の場合、実際の空の方向と一致しないことがありますが、それは問題ではありません。
ガイド性能は、ピクセルではなく秒角という単位で見ることが推奨されています。 これは、焦点距離や画像スケールの問題を調整する必要がないため、機器に依存しない性能評価方法を可能にします。 つまり、ガイドスコープの焦点距離、ガイドカメラのピクセル、ビニングレベルです。 これらの設定が正しいことを確認するためには、新しいプロファイルウィザードを使用するのが一番良い方法です。
グラフ画面の下部には、ガイドパラメータを急いで調整するためのアクティブコントロールが表示されます。 どのコントロールが表示されるかは、選択したガイドアルゴリズムによって決まります。 これらのコントロールは「脳みそ」ダイアログにあるものと同じ効果があり、ガイドを停止して別の画面に移動してガイドパラメータを調整する必要がなくなります。 これらのコントロールは目立つように表示されていますが、一般的にガイド中に大きく変更することは生産的ではありません。 ガイドの改善には、通常、長いガイド間隔とPHD2 ログビューアツールによる慎重な分析が必要です。 ガイドの結果が悪いのは、通常、ユーザーのミス、マウントの機械的な問題、またはマウント上のギアの動きによるものです。 やみくもにガイドパラメータを変更しても、これらの問題の解決にはならず、通常は問題を悪化させます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

星のプロファイルとターゲット表示
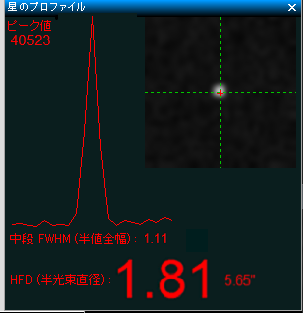
星のプロファイル画面には、ガイド星の断面が半値全幅 (FWHM) と半光束直径 (HFD) の測定値とともに表示されます。HFDは、適合曲線や 星像の全体的な形についての仮定を必要としないので、一般に星の大きさをより安定的に測定することができます。このパラメータが大きく変動していたり、星のプロファイルが大きく変化する場合は、星が暗すぎる、露出時間が短すぎる、カメラのピントが合っていない、シーイングが悪い、などの可能性があります。このツールは、オフアクシスガイダーや小型のファインダースコープを使用している場合、面倒なガイドカメラのピント合わせをサポートするツールです。 ピント合わせのために、HFD番号が大きく表示されているので、遠くからでもガイドスコープやカメラのピント合わせが可能です。星のプロファイル画面のドッキングを解除し、HFD番号が見やすくなるまでウィンドウを拡大します。ピンぼけでスタートした場合、フレーム内に数個のぼんやりした星しか見えないと思いますので、はっきり見える一番小さな星を選べばいいです。シーイングを追いかけないように、露出時間はなるべく2秒以上にしましょう。 同時に、星が飽和して、上部が平らになってしまわないように注意しましょう。このとき、HFDが小さくなるようにピントを合わせますが、HFDが反転したり、横ばいになりそうになったら、すぐに止めましょう。このとき、星が飽和している可能性があるので、フィールド内の薄暗い星に移動します。 すでにピントが合っているので、うまくいけばもっと暗い星が見えるはずです。 このようにして、最も暗い星に対して最低限のHFDを示すフォーカスポイントに到達するまで続けます。 ピント合わせの各段階で、何コマかHFDの値を見ながら、シーイングの影響を精神的に平均化するとよいでしょう。 ピント合わせがうまくいかないと、キャリブレーションがうまくいかなかったり、ガイドの結果が悪くなるなど、初心者にありがちな問題です。バーティノフのフォーカスマスクや、SharpCapのような別のアプリでピント合わせをすることも可能です。 一般に、画像表示の星を見るだけでは臨界点に達することはできません - 何らかの測定補助が必要です。ガイド中は、星のプロファイルツールを使って、星が上図の例のように平らでなく(飽和)、先細りの形状を示すことを確認できます。 星のプロファイル画面が十分に大きければ、星の重心のX/Y座標も10進数で表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。
AOグラフ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

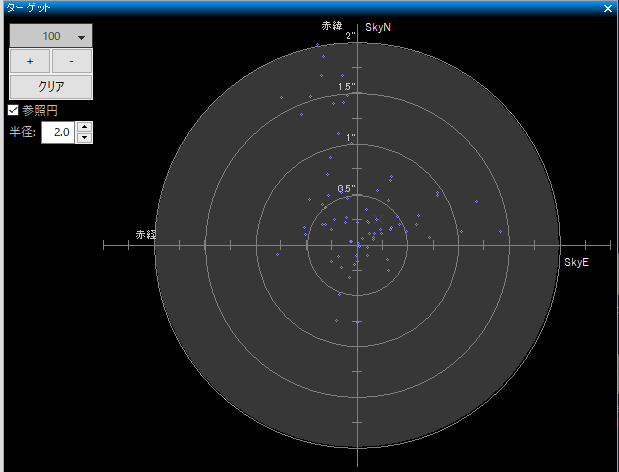
AOグラフは「ターゲット」表示と同等ですが、AO装置の軸に対する補正の履歴が表示されます。 赤い長方形はAOデバイスの外縁を示し、内側の黄色い長方形は「bump」領域を示しています。星が黄色の長方形の外側に移動した場合、PHD2はマウントに一連の移動コマンド(bump)を送り、ガイド星をスムーズに中心位置付近に戻します。 このとき、緑と青の線は、それぞれbumpの増分と残りのbumpを表します。画面上の白い点は現在のAO位置を、緑の円(bump中は赤)は平均化されたAO位置を示しています。 左上のボタンは、履歴にプロットされる点数を制御します。
ドッキング・移動可能な画面
様々なパフォーマンス画面が最初に表示されるとき、それらはメイン画面の中に「ドッキング」されています。つまり、特定のサイズに設定され、画面の2つの端に配置され、PHD2のメイン画面内に完全に収まるということです。しかし、調べたい画面のタイトルバーをクリックしてドラッグすることで、移動やサイズ変更をすることができます。 これにより、グラフに表示されている詳細がよりよく見えるようになることが多いのです。タイトルバーをドラッグして、下、右など、ドッキングさせたい一般的な領域に移動させると、再ドッキングできます。少し練習するだけで、使いやすい場所に簡単に配置できます。