ビデオストリームの回転解除
|
ビデオストリームの回転解除(火星、木星、土星、天王星、海王星) |
ビデオストリームの回転解除 – 前書き
|
ビデオストリームの回転解除 – 前書き |
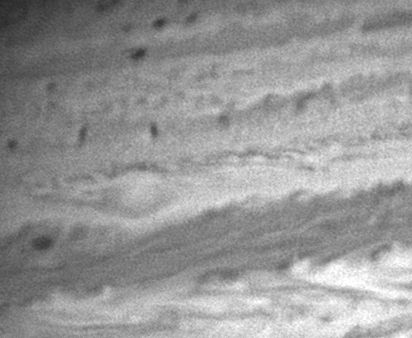
ビデオ録画からの数千フレームからの惑星画像の計算は非常に一般的です。 しかし、木星の急速な回転は、記録の期間を約2分に制限します。 時間が経つと、惑星の表面や輪郭の詳細がぼやけます。
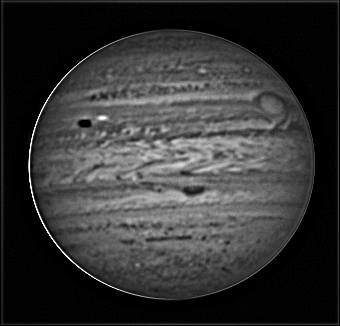
Jupiter、2011-10-22、21:33-21:43 UTからの10分間のビデオ、赤チャンネル、Torsten Edelmann、ドイツ、Aperture 230mm、Registax 5.0
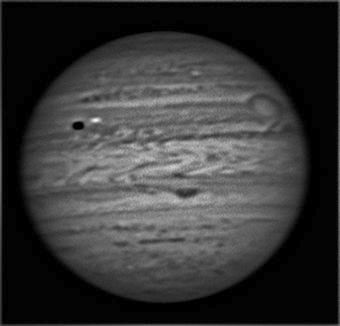
惑星表面の真ん中の雲の構造へのアラインメント
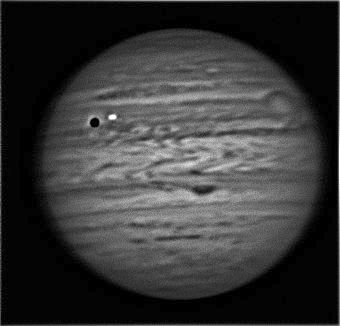
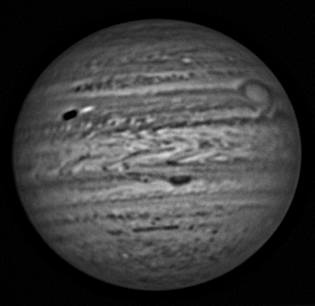
イオの影へのアラインメント
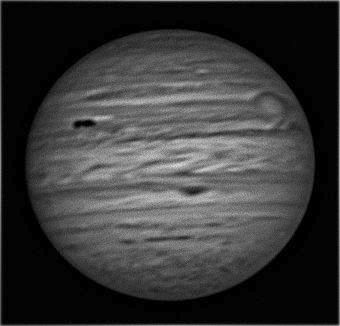
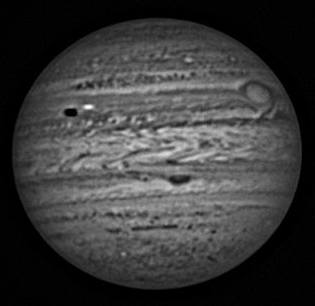
アラインメント「重力の中心」
モジュール「ビデオストリームの回転解除」は、すべてのフレームが正確な平均時間に関連するように、ビデオ録画のフレームを修正します。 その後、より長い録画を処理できます(約15分まで)。 同じ画像周波数で、はるかに多くのフレームを使用したり、フレームのノイズを減らして露出時間を長くしたりできます。 2つの方法を使用して、採用された惑星の画像を処理できます。

21:33-21:35UTからの2分間のビデオ、 Registax 5.0

21:33-21:35UTからの2分間のビデオ
WinJUPOSによる回転の修正
「スタック画像」を出力
Registax5.0によるウェーブレットシャープニング
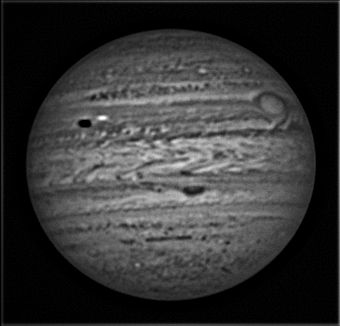
21:33-21:43UTからの10分のビデオ
WinJUPOSによる回転の修正
「スタック画像」を出力
Registax5.0によるウェーブレットシャープニング
(衛星イオと影は修正されません)
標準処理に対する回転補正による2分間の記録の強化は、補正された画像の計算とスタッキングでの双一次補間の使用に由来します。
回転補正では、次の手順が必要です。
1. 10分のビデオをキャプチャ-> Jupiter10min.avi。
2. このビデオの一部から通常の画像を計算します(最大2分)-> Jupiter2min.png。
3. WinJUPOSでこの画像のアウトラインフレームを測定します - 画像測定と保存設定ファイル-> Jupiter2min.ims。
4. 開始モジュールビデオストリームの回転解除。
5. 元のビデオ= Jupiter10min.avi
6. ビデオの開始時間を設定する。
7. 元のビデオからの予備画像の画像測定= Jupiter2min.ims
8. ビデオストリームの回転解除を開始する。
9. 修正されたビデオ:Registax-> Jupiter10min.pngを使用して、修正されたビデオ(Jupiter10min-DeRot.avi)から通常の画像を計算します。
10. スタック画像:Registax-> Jupiter10min.pngのウェーブレットシャープニング機能を使用できます。
l 元のビデオ
修正する動画をここに入力してください。 以下の動画を受け付けています
l AVI はグレースケールまたは RGB / 8 ビットのいずれかです。いくつかの圧縮フォーマット(インストールされているコーデックとリンクされている)は読み込めますが、圧縮フォーマットは重要な画像情報が失われるので役に立ちません。
l ルメネラSERファイルモノラル、またはベイヤー-RGB / CYM /8..16ビット。
重 要
WinJUPOSは、元のビデオの最初のフレームを参照画像として使用します。その中で、惑星から空の背景を分離するための平均背景輝度としきい値が計算されます。 この画像が有効であることを確認してください。
l 開始時間(UT)
UTでのビデオの開始時刻をここに入力します。 AVIデータの場合、UTの終了時刻が自動的に計算されます。
l 終了時間(UT)
ここにUTの終了時刻を入力します。
画像キャリブレーション (オプション)
l 元のビデオからの予備画像の画像測定
正確な回転補正には、予備画像の測定値の入力が必要です。 サイズ、傾き、画像の向き(通常/ミラービュー)、カメラピクセルの比率、およびLD補正のパラメーターに関する情報が使用されます。
個別の画像ごとに正しいLD値を設定するように注意してください。 値が高すぎる場合(モジュール画像測定でテストできます)、結果は最終的な画像/ビデオで非常に醜い手足の効果になります。
[方位マウント上の高度でのフィールド回転の補正 (Compensation of field rotation in altitude over azimut mounts) ]オプションがアクティブになっている場合は、観測場所と記録時間の入力を慎重に行う必要があります。
l 方位マウント上の高度でのフィールド回転の補正
空の惑星の位置と記録期間に応じて、方位望遠鏡の場合、フィールドの回転は問題を引き起こします。
修正なし 修正あり
l 正確なシングルフレームキャリブレーション
明るさの変化、惑星の衛星、画像のキャプションとは関係なく、各ビデオフレームの天体の位置を個別に決定します。
出 力
出力タイプの選択は、基本的に使用する録画条件によって異なります。 中小規模の望遠鏡(口径が約250 mmまで)の場合、積み重ねられた画像の計算が最も価値があります。 より大きな望遠鏡の場合、Registax 6の幾何学的補正機能を使用できるようにするには、補正されたビデオを計算する必要があります。これにより、大気の動きを部分的に補正できるため、より良い結果が得られます。
Jupiter、2011-10-14、22:13、Red channel、Jean-Luc Dauvergne、フランス、Aperture 1000mm
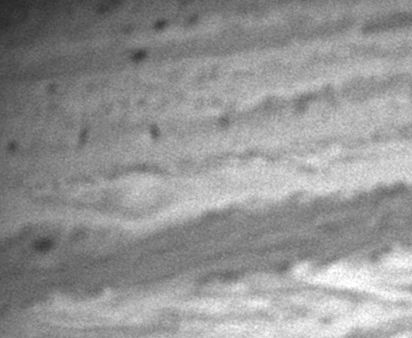
「スタック画像」を出力 「修正されたビデオ」を出力します
Registax6.0によるウェーブレットシャープニング Registax6.0とジオメトリ補正で処理
l 修正されたビデオ
出力修正されたビデオには、回転からの修正されたフレームのみが含まれます。
|
元の形式 |
出力形式 |
|
SER / AVIモノクロ |
SERモノクロ |
|
SER / AVIベイヤー - RGBまたはRGB |
それ以外の場合はSERRGB(バージョン3): |
|
AVI RGB <2GB |
AVI RGB |
|
AVI RGB > 2GB |
SERモノクロ(R / G / B) |
|
SERベイヤー - RGB |
SERモノクロ(R / G / B) |
参照 : プログラム/設定/オプション-RGB SERビデオの書き込み(SERバージョン3)
l 積み上げ画像
スタック画像では、すべてのフレームで回転が修正され、修正されたすべての画像がスタックされます。 スタッキングは、たとえばRegistax6で可能な幾何学的補正なしで行われます。
l 基準時間(UT)
参照時間は自動的に計算され、開始時間と終了時間の平均に設定されます。
l プロセッサー使用率
コンピューティングには、システムで使用可能なすべてのプロセッサ/プロセッサコアが使用されます(プロセッサ使用率= 100%)。 他の作業のために計算能力が必要な場合は、能力を使い果たして、再び増やすことができます。
|
(c) Grischa Hahn, Michel Jacquesson , 2018 |
画像キャリブレーション
|
画像キャリブレーション |
大まかなビデオ画像には、システムからの多くのエラーが含まれています:CCDカメラからのノイズ、画像上の明るいまたは暗いピクセル、CCDセンサー上のピクセルと不純物の感度の違い、または記録中の光の経路 システム。 これらのエラーは、暗視野およびフラットフィールド画像によってキャンセルできます。
[方位マウント上の高度でのフィールド回転の補正 (Compensation of field rotation in altitude over azimut mounts) ]オプションがアクティブになっている場合、補正されたビデオの画像(フィールド回転を含む)はキャリブレーションされた画像に対応しないため、このキャリブレーションは逆回転の前または最中に実行する必要があります。
元の画像(ラフ画像) I

ダークフレーム D

フラットフィールド F'
キャリブレーションされた画像 I'

l ダークフレーム(D)
ダークフレームは、元のフレームの直前または直後に、ラフ画像と同じ露光時間と温度で、オープンカメラで作成されたフレームです。 暗電流によるノイズを打ち消すために使用します。 ダークフレームはラフフレームから差し引かれます(ダークカレントまたはダークフレーム補正)。 ピクセルは、温度条件に対して異なる方法で強く反応します。つまり、特定のCCD温度に対して、各ピクセルは暗いものとして異なる電流を生成します。 特定のピクセルでは、暗電流が一定値を中心に変動するため、補正が可能です。 特に高い暗電流を持つピクセルは、ホットピクセルと呼ばれます。
センサーの温度ノイズの影響を最小限に抑えるために、単一のダークフレームだけでなく、一連のそのような画像を作成して、マスターダークフレームと呼ばれる中央値のダークフレームを生成することをお勧めします。
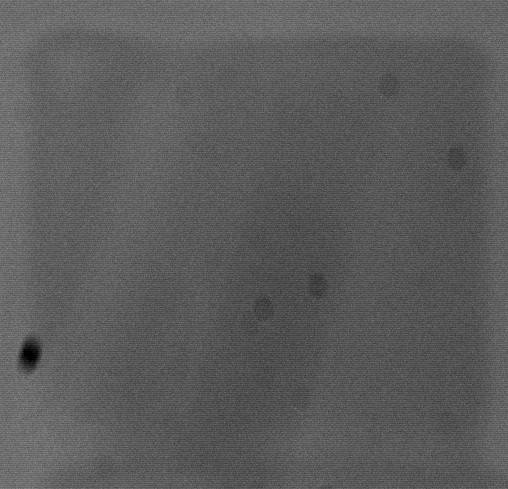
l フラットフィールド(F)
CCDチップ上の不純物、ピクセルの感度の不一致、または使用される光学系(口径食、反射)に起因する輝度の違いを平準化するために、機器を均一な照明面に向けたフラットフィールドが記録されます。 次に、ラフフレーム(ダークフレームがすでに差し引かれている)がフラットフィールド(フラットフィールド補正)で除算され、フラットフィールドの平均値が乗算されます。 たとえば、ピクセルがほこりで50%覆われている場合、測定された強度は、記録されたオブジェクトとフラットフィールドによって減少します。 ほこりがなかったので、フラットフィールドの小さな輝度値で除算すると、真の値が得られます。
フラットフィールドの記録には、均一な照明面が必要です。 生成されたフラットフィールドは、望遠鏡の焦点が変わらない、新しい塵が光路に入る必要がない、または現在の塵がその場所を変えてはならないすべての画像に使用できます。 カメラの新しい位置により、画像上のほこりが移動し、フラットフィールドを使用できなくなります。 そうすると、画像を補正できなくなります。 その場合、カメラの安定した位置が必要です。
フラットフィールドを作成するには2つの方法があります。 まず、夜明けまたは夕暮れ時に、望遠鏡を空の均一な明るい部分に向けます。 不可能な場合は、人工の均一な光を使用できますが、この方法は難しい場合が多く、空の自然光が最も簡単な解決策です。 たとえば、望遠鏡の前にあるつや消しの草を使用してフラットフィールドを作成できます。これは、入射光が柔らかくなり、散乱して明るさの差が最小限になるためです。
フラットフィールドを作成する場合、露出時間は、ピクセルの容量の約2/3が含まれるように選択する必要があります。 このフラットフィールドフレームは、他の画像と同様に、それ自体を補正に使用する前に、(マスター)ダークフレームを差し引くことによって補正する必要があることに注意してください。 最も正確な科学的使用には、信号/ノイズの比率が高いため、マスターフラットフィールドの生成が推奨されます。 このマスターは、中央値を生成するいくつかのフラットフィールド((マスター)ダークフレームを差し引いた後)からも作成されます。
l フラットフィールドオフセット(FO)
未補正のフラットフィールド用の特別なダークフレームです。
さまざまなキャリブレーションされた画像の計算
|
D |
I ' = (I - D) |
|
F, FO |
mF = (F - FO)のすべての画像ピクセルの平均値 I ' = I / (F - FO) * mF |
|
D, F, FO |
mF = (F - FO)のすべての画像ピクセルの平均値 I ' = (I - D) / (F - FO) * mF |
|
D, F ' |
F 'はフラットフィールドで補正されたダークフィールドです mF ' = F 'のすべての画像ピクセルの平均値 I ' = (I - D) / F ' * mF ' |
出 典
Wikipedia
http://www.pixelmask.de
|
(c) Grischa Hahn, Michel Jacquesson , 2012 |