画像測定
|
画像測定 |
画像測定 - 前書き
|
画像測定 - 前書き |
モジュール画像測定を使用すると、天体の表面上のオブジェクトの位置を測定できます。
天体のすべての地上画像が適していますが、UTでの記録日時と画像の向きを知っている必要があります。 詳細情報は、観測者、画像のスペクトル範囲、およびセンサー要素のエッジ比(オプションを参照)に関連しています - これらがわかっている場合。
さらに、2007年にニューホライズンズ探査機によって撮影された木星の画像を測定することができます。
画像を測定する場合は、アウトラインフレームで体の位置を決定し、クロスワイヤーでオブジェクトの位置を決定する必要があります。
オブジェクトの位置は、プラネトグラフィックまたは平面中心(L1-3、B "/ B)およびデカルト(x、y)座標として表示されます。
次のキーの組み合わせを押すと、測定ウィンドウのさまざまなページをアクティブ化できます。
|
[Ctrl]+[I] |
画像定義(Image) |
|
[Ctrl]+[A] |
画像の調整(Adjust.) |
|
[Ctrl]+[S] |
オブジェクトの位置(Pos.) |
|
[Ctrl]+[M] |
その他(Misc.) |
|
[Ctrl]+[O] |
オプション(Opt.) |
|
(c) Grischa Hahn, 2010 |
画像の定義
|
画像測定 - 画像の定義 |
CCD画像だけでなく、文献からスキャンした写真、図面、惑星の図を測定することもできます。 プリントやスキャンを行うときに、フォトネガや本の画像がねじれないように注意してください。 WinJUPOSは、元のセンサー画像に関連する幅と高さの伸びを修正することができます。 したがって、センサー要素のエッジ比が1:1でない場合は、WinJUPOSにロードする前に画像を回転させないでください。
気を付けること
l 惑星の輪郭は、位相によって暗くならない側で明確でなければなりません(これは、画像の明るさ、コントラスト、およびガンマ係数の適切な選択によってのみ決定できます)。
l 惑星の円盤の向きは規定されていませんが、知っている必要があります。
画像の露光時間が次の規則に従ってファイル名にコード化されている場合、この情報はファイルを選択するときに対応するデータフィールドに自動的にコピーされます。
Miyazakiコンベンション
"MDDHHMM[T].<ext>"
|
M |
{1..9, O, N, D} |
月 1月.. 12月 |
|
DD |
{0..9} |
日 |
|
HH |
{0..9} |
時間(UT) |
|
MM |
{0..9} |
分(UT) |
|
T |
{0..9} |
オプションの10分の1分(UT)または |
|
|
{C} |
カラー画像 |
|
|
{R} |
赤チャンネル |
|
|
{G} |
緑チャンネル |
|
|
{B} |
ブルーチャンネル |
|
|
{I} |
赤外線 |
|
|
{M} |
メタン |
手動で入力する必要があるのは、年、観測者、画像の情報だけです。
WinJUPOSコンベンション
"[Observer-]YYYY-MM-DD-HHMM[.][T][-Image info].<ext>"
"YYYY-MM-DD-HHMM[.][T]-Observer[-Image info].<ext>"
|
観測者 |
{Text without '-'} |
オプション |
|
YYYY |
{0..9} |
年 |
|
MM |
{0..9} |
月 |
|
DD |
{0..9} |
日 |
|
HH |
{0..9} |
時間(UT) |
|
MM.T |
{0..9} |
分(UT)。 10分の1、オプション |
|
画像情報 |
{Text without '-'} |
オプション |
BAAコンベンション
"YYYYMM[M]DD_HHMM[.][T]_Observer[_Image info].<ext>"
|
YYYY |
{0..9} |
年 |
|
MMM |
{JAN, FEB, MAR, APR, MAY, JUN, JUL, AUG, SEP, OCT, NOC, DEC} |
月 |
|
MM |
{1..12} |
月 |
|
DD |
{0..9} |
日 |
|
HH |
{0..9} |
時間(UT) |
|
MM |
{0..9} |
分(UT) |
|
T |
{0..9} |
10分の1分 |
|
観測者 |
{Text without '_'} |
|
|
画像情報 |
{Text without '_'} |
オプション |
PVOLコンベンション
"PYYYY-MM-DD_HH-MM[-SS][_Filter][_Observer][_Info].<ext>"
|
P |
{Character, not '_'} |
天体のコード('j' for Jupiter; 's' for Saturn; 'u' for Uranus) |
|
YYYY |
{0..9} |
年 |
|
MM |
{0..9} |
月 |
|
DD |
{0..9} |
日 |
|
HH |
{0..9} |
時間(UT) |
|
MM |
{0..9} |
分(UT) |
|
SS |
{0..9} |
2番目(UT)、オプション |
|
フィルター |
{Text without '_'} |
オプション |
|
観測者 |
{Text without '_'} |
オプション |
|
情報 |
{Text without '_'} |
オプション |
(画像情報=フィルター[+ '_' +情報])
地理的緯度は赤道の南で負です。 地理経度はグリニッジの西側で負です。
ニューホライズンズミッションの木星の画像は、フィールドObserverに「New Horizons」または「NewHorizons」と入力して識別する必要があります。 その場合、天体暦は宇宙船の位置に対して自動的に計算されます。
測定する画像をマウスの右ボタンでクリックすると、画像制御に役立つコマンドを含むポップアップメニューが開きます。 これらのコマンドは、ウィンドウの左側でも使用できます。
設定
l リセット
画像測定のすべての設定をデフォルト値にリセットします。
l 保存/ロード
それぞれを保存します。 画像測定の現在の設定をロードします。 用途設定ファイルの名前(* .ims)が画像測定ウィンドウのキャプション行に表示されます。
l 天体暦
モジュールEphemerides(天体暦)を開き、対応する時間と画像測定の地理座標を示します。
|
(c) Grischa Hahn, 2013 |
画像の調整
|
画像測定 - 画像の調整 |
一般的な手順
1. 測定ウィンドウの中央にすべての惑星が表示されている惑星画像を移動してズームします。
2. 暗い背景がわずかに明るくなり、大気の特徴がどれほど劣っていても、真の手足がはっきりと見えるようになるまで、明るさを上げます。 これを実現するために、コントラストとガンマ係数を変更することもできます。
3. アウトラインフレームを真の惑星の手足にできるだけ正確に合わせます。 ターミネーターは、位相が反対の手足よりも暗い空の背景に多くの陰影を付けることが多いことに注意してください。 したがって、主に手足に輪郭を調整します。 反対する前に、フェーズはpに位置しています。 惑星の側面、そのf。 その後手足。 この位置決めの精度は、測定の品質に決定的な影響を与えることに注意してください。
4. 惑星表面上のすべてのオブジェクトが表示されるように、ガンマ値(場合によっては明るさとコントラスト)を変更します。 必要に応じて、LD補正をオンにし、LD値を変更します。
画像
スクロールコントロールを使用するだけでなく、マウスの中ボタン(またはマウスホイール)を押したままにして画像を移動することもできます。 クイック移動(s。オプション)をアクティブにしている場合、画像はマウスカーソルで移動します。それ以外の場合は、最初にマウスボタンを離したときに移動します。
l チャンネル
表示する画像のカラーチャンネルを選択します。 代替の[F9]または[Strg] + [F9]。
l ズーム
|
[+] |
画像を1.15倍に増やします |
|
[Ctrl]+[+] |
画像を1.33倍に増やします |
|
[Shift]+[+] |
画像を1.07倍に増やします |
|
[-] |
画像を1.15倍に減らします |
|
[Ctrl]+[-] |
画像を1.33倍に減らします |
|
[Shift]+[-] |
画像を係数1.07減少させます |
|
[Alt]+[0] |
元のサイズ、ズーム率= 1.0 |
l 回転
|
[L] |
画像を左に1°回転します |
|
[Ctrl]+[L] |
画像を左に10°回転します |
|
[R] |
画像を右に1°回転します |
|
[Ctrl]+[R] |
画像を右に10°回転します |
|
[Ctrl]+[Backspace] |
画像を180°回転します |
|
[Ctrl]+[0] |
回転= 0° |
|
[Ctrl]+[H] |
赤道を水平位置で回転させます |
l ガンマ
|
[G] |
ガンマ係数を1.03倍に増やします |
|
[Ctrl]+[G] |
ガンマ係数を1.22倍に増やします |
|
[Shift]+[G] |
ガンマ係数を係数1.03減少させます |
|
[Ctrl+Alt]+[G] |
ガンマ係数を1.22倍減少させます |
l 輝度
|
[B] |
明るさを1つ上げます |
|
[Ctrl]+[B] |
明るさが10増加します |
|
[Shift]+[B] |
明るさを1つ減らします |
|
[Ctrl+Alt]+[B] |
明るさを10減少させます |
l コントラスト
|
[C] |
コントラストを1.03倍に増やします |
|
[Ctrl]+[C] |
コントラストを1.22倍に増やします |
|
[Shift]+[C] |
コントラストを1.03倍下げます |
|
[Ctrl+Alt]+[C] |
コントラストを1.22倍下げます |
l LD補正
周縁減光の補正のオンとオフを切り替えます。 天体の周縁減光の補正は、体の画像の測光輝度を平準化します。 周縁減光は、照明の方向、表面の性質、および光の波長によって異なります。 以下のいくつかの専門分野
l 太陽
補正は可能ですが、最適なLD値は、使用するカラーチャネルに大きく依存します。
l 火星
補正は可能ですが、火星の実際の表面を示すのは赤色光(およびより長い波長)のみであるため、より長い波長の場合のみです。 より短い波長は、修正不可能な大気と雲(および極冠)を示します。
l 月
補正は可能ですが、非常に遅い方法 [3] です。 全体的な明るさの違いが失われ、極端に明るい領域または暗い領域がカットされます(測光)。 その結果、測光「フラット」になり、コントラストが低くなります。 LD値で輝度レベルを中程度に修正してください。 明るさは0、コントラストは1より大きい必要があります。
画像処理で(月ではなく)線形ではない明るさの変換を使用した場合、周縁減光の補正は問題があるか不可能です。
l LD値
太陽の値1.0は、白色光における太陽の明るさプロファイル [2]を意味します。 他のすべてのボディの場合、LAMBERTによる理想的な拡散反射体の輝度プロファイル [1]は1.0を意味します。 多くの場合、最適な結果を得るには、この値を減らす必要があります。 月のLD値は、グローバル輝度レベルに対応します。
木星の周縁減光補正の一例
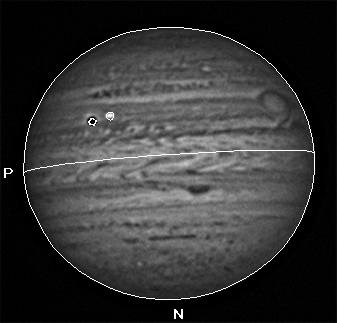
周縁減光補正なし
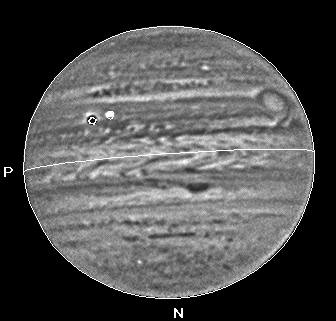
LD = 0.90での正しい周縁減光補正
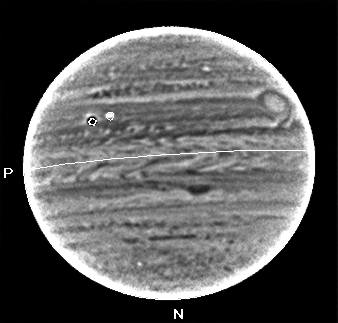
LDが高すぎる周縁減光補正= 1.16
l LD角度
周縁減光の補正中に、明るさの均一な補正が行われます。 補正値は、サーフェス (surface) のセグメント (segment) によって生成されます。 惑星の中心から「LD角度」と見なされるこのセグメントのポイントは、地球と太陽からそれほど遠くありません。 この角度を小さくすると、元の拡散反射モデルには不十分なため、手足と極が除外されます。 それは、例えば、明るいポールキャップ、雲、手足の加工遺物に関係しています。
火星の周縁減光補正に対するさまざまな「LD角度」の影響の一例
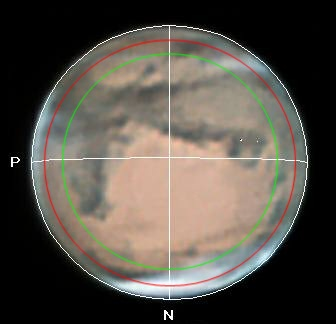
明るさ補正用の2つの異なる表面セグメントを持つ火星(LDなし)。
赤は、LD角度= 65°の領域を区切ります。 これは、r = 0.91の惑星半径の円に対応します。
緑は、LD角度= 50°の領域を区切ります。これは、r = 0.77の惑星半径の円に対応します。 [r = sin(LD角度)]
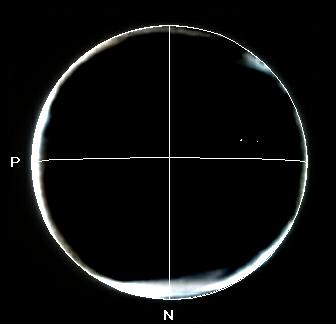
LD角度= 65°(赤い領域)での周縁減光補正。
北の赤の領域には非常に明るい雲の構造が表示されているため、明るさ補正の値はかなり歪んでいます。
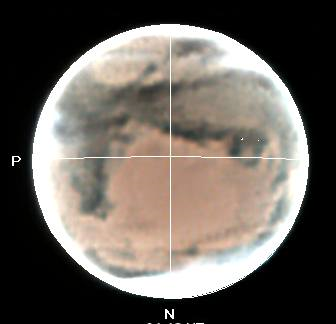
LD角度= 50°(緑色の領域)での周縁減光補正。
雲の構造が表示されないため、緑の領域が縮小されます。 これで、明るさの値が中央領域で正しくなりました。
l その他のコマンド
l 画像の元のサイズ (Original size of image)
画像を元のサイズに戻すズーム率を1.0にリセットします。
l 画像の元の回転 (Original rotation of image)
回転角を0にリセットしてから、画像を元の位置にリセットします
l リセット (Reset)
画像のすべての設定をデフォルト値にリセットします。
アウトラインフレーム
アウトラインフレームは正しく平坦化され、位相補正され、惑星の赤道によって補完されます。 位相と赤道傾斜は、記録日とUTに基づいて計算されます。 惑星の北極は「N」でマークされ、p。 アウトラインフレームの「P」による手足(惑星の東)。 一般的な画像の向きは、画面の右上隅に表示されます。
センサー要素のエッジ比(オプション)を変更することで、画像の高さと幅の比の歪みの可能性を補正できます。
アウトラインフレームを惑星の画像に合わせるには、次のキーを使用します。
l [Arrow keys] アウトラインフレームを削除します
l [PageUp] アウトラインフレームを増やします
l [PageDown] アウトラインフレームを減らします
l [N] アウトラインフレームを時計回りに1°回転します
l [P] アウトラインフレームを反時計回りに1°回転します
これらのキーを[Ctrl]と組み合わせると、効果が10倍になり、[Shift]と組み合わせると、効果が1/10に減少します。 さらに利用できるのは
l [Backspace] アウトラインフレームを180°回転します
l [Space] アウトラインフレームの表示/非表示を切り替えます
l [Ctrl]+[Z] アウトラインフレームを測定ウィンドウの中央に配置します
l [Ctrl]+[Alt]+[L] すべて左に90°回転します
l [Ctrl]+[Alt]+[R] すべて右に90°回転します
l 色の値
アウトラインフレームの色を変更します。 代替の[F10]または[Ctrl] + [F10]。
l アウトラインフレームを描く
アウトラインフレームの表示をアクティブまたは非アクティブにします。
l その他のコマンド
l 自動検出(木星のみ) (Automatic detection)
WinJUPOSは、アウトラインフレームの配置を自動的に推定することができます[1]。 [Backspace]と画像の向き(オプション)およびセンサー要素のエッジ比(不明な場合は「?」を入力)(オプション)を使用して、右上隅で説明されている基本的な画像の向きを設定するだけです。 実際、アウトラインフレームの位置、サイズ、回転は面白くなく、明るさ、コントラスト、ガンマ係数の選択も重要ではありません。 [F11]を押してしばらく待つと、アウトラインフレームが調整されます。 計算時間は、画像のプロパティとPCの速度の両方に依存します。 アウトラインフレームの自動計算は、常に画像の現在のビューに関連しています。
自動測位の品質は手動調整の品質に似ていますが、さまざまな画像要素に依存します。 過度に重い画像処理と高いJPEG圧縮率は、特に赤と青のRGBチャネルの場合に悪影響を及ぼします。
センサー要素のエッジ比を不明( "?")に設定した場合、WinJUPOSはその実際の値を推定しようとします。 ただし、そのオプションを避け、最適な値(多くの場合1:1)を事前に選択することをお勧めします。 そうすれば、より正確な結果が得られます。
すべての自動結果を目で確認し、必要に応じてアウトラインフレームの位置を手動で改善してください。
目に見える木星の輪郭が実際の手足に対応していない場合、例えば メタンバンド (methane-band) 画像では、[F11]関数は常に失敗します。
l センターアウトラインフレーム (Centres outline frame)
アウトラインフレームを測定画面の中央に配置します。
l アウトラインフレームの赤道を水平に回転させる (Rotate equator of outline frame horizontally)
赤道が水平になるようにアウトラインフレームを回転させます。
l 画像が赤道座標系にキャプチャされたかのようにアウトラインフレームを回転します (Rotate outline frame as if image was captured to Equatorial system)
画像が赤道座標系で設定されていることが確実な場合(WinJUPOSでの位置は重要ではありません)、そのコマンドでアウトラインフレームを正しい位置に向けることができます。 前に、バックスペースキーを使用して、南北の位置が正しいことを確認してください。
カメラが赤道望遠鏡の主軸に沿って正確に向けられているとき、および画像がWinJUPOSで回転されていないとき、画像はその位置に設定されます。
アウトラインフレームを赤道儀に合わせる別の方法は、非追跡望遠鏡の視野で天体の見かけの動きを使用することです。 動きは天の赤道と平行です。
l ビデオから赤道ベクトルを決定する (Determine equatorial vector from video)
赤道ベクトルの決定には、望遠鏡の追跡なしで撮影された天体のビデオが適しています。 天体は、視野のできるだけ大きな部分をカバーする必要があります。
天体の正しい画像は、望遠鏡で追跡するビデオから計算されます。2つのビデオの間で、望遠鏡のカメラが回転しないことが重要です。
パララクティックマウント上の望遠鏡の場合、カメラが回転していない限り、決定された赤道ベクトルは有効です。 方位角マウント上の望遠鏡の場合、次の画像フィールドの回転が検出可能限界を下回っている限り、赤道ベクトルは有効です。
l 赤道ベクトルを定義する (Define equatorial vector)
ビデオの代わりに、二重露光画像または2つの単一画像も適しています。 最初の画像は画像フィールドの片側に天体を示し、2番目の画像は反対側に天体を示しています。 単一の画像が2つある場合は、[画像]-[画像の追加](Ctrl + F7)ボタンを使用して2番目の画像を最初の画像にクロスフェードできます。
赤道ベクトルの定義コマンドを開始した後、測定画面の対応する2つのポイントをマウスの左ボタンでクリックできます。 2点の間に赤い線が引かれます。 開始点(小さな円でマークされている)は時間tでのオブジェクトの位置を定義し、終了点は後の時間t + iでの同じオブジェクトの位置を定義します。
l 赤道ベクトルを削除する (Delete equatorial vector)
以前に定義された赤道ベクトルを削除します。
l アウトラインフレームを赤道ベクトルに回転します (Rotate outline frame to equatorial vector)
赤道ベクトルに従ってアウトラインフレームを回転し、ベクトルを削除します。 地球の月の画像を測量する場合は、観測点の正確な地理的緯度と経度が指定されていることを確認してください。
l リセット
アウトラインフレームのすべての設定をデフォルト値にリセットします。
画像とアウトラインフレーム
l その他のコマンド
l アウトラインフレーム(および画像)を中央に配置 (Centres outline frame (and image))
アウトラインフレームと画像を画面の中央に配置します。
l アウトラインフレーム(および画像)の赤道を水平に回転させます (Rotate equator of outline frame (and image) horizontally)
画像と一緒にアウトラインフレームを回転させて、赤道を水平にします。
|
(c) Grischa Hahn, Michel Jacquesson , 2020 |
オブジェクトの位置
|
画像測定 - オブジェクトの位置 |
クロスワイヤ (cross-wires) を配置して、問題のオブジェクトにマークを付けます。 その惑星座標とデカルト座標がウィンドウの上部に表示されます。 デカルトのx-y座標系の原点は、惑星全体の楕円の中心と同じであり、その単位は赤道半径です。 正のx軸はpを指します。 方向と手足の惑星の赤道をカットします。 正のy軸は惑星の北を指し、地球から見た惑星の自転軸の投影と同じです。
木星と土星については、対応する緯度での短命の物体の平均ドリフトも表示されます。 木星と土星のドリフトプロファイルも比較してください。
オブジェクトを選択すると、次のキーがアクティブになります。
l [Arrow keys] クロスワイヤ (cross-wires) を削除します。 [Ctrl] + [矢印キー]を押すと、クロスワイヤの速度が10倍になります。
l [Ctrl]+[Alt]+[L] すべてを左に90°回転します。
l [Ctrl]+[Alt]+[R] すべてを右に90°回転します。
クロスワイヤー (Cross-wires)
l タイプ
クロスワイヤの種類を変更します。
l サイズ(F6)
「小クロスワイヤー」のサイズを変更します。 代替の[F6]または[Shift] + [F6]。
l
![]()
クロスワイヤの明るさを変更します。 代替の[F10]または[Ctrl] + [F10]。
l クロスワイヤーを描く(スペース)
クロスワイヤを表示/非表示に切り替えます。 代替[スペース]。
測定ファイル
l 選択する
使用する測定ファイルを選択します。
l 編集(F4)
選択したファイルを開き、可能であれば、測定画像の時点で最初の記録にカーソルを直接設定します。
l 割り当て解除
選択した測定ファイルの割り当てを解除します。
使用したファイルの名前は、[測定ファイル]ボタンの下に太字で表示されます。
オブジェクトの位置を保存
選択した測定ファイルの現在のクロスワイヤ (cross-wires) 位置にあるオブジェクトの位置を保存します。 代替[Enter]。
測定対象物の位置
l ディスプレー(Ctrlスペース)
使用済み測定ファイル内のすでに測定されたオブジェクトの位置を時間間隔で表示します。 測定位置を表示および削除するには、[Ctrl] + [スペースバー]を使用できます。
表示された画像(±1分)で行われた測定には、垂直および水平の十字(+)のラベルが付いています。 別の時間に行われた測定には、セントアンドリュースの十字(x)のラベルが付いています。
この機能は、両方の画像に表示されているオブジェクトが2回測定されないように、すでに少し前に天体が測定されている場合(木星の場合、2時間未満)に非常に役立ちます。
l オブジェクトの説明
測定対象物にマウスカーソルを合わせると、対象物の説明が表示されます。
さらに、オブジェクトの説明が表示されているときに右クリックすると、コンテキストメニューが開き、測定ファイル内の対応する記録の編集または削除が可能になります。
l サイズ
先行測定にラベルを付けるために使用される十字のサイズの調整。
l
![]()
先行測定のラベル色の調整。 [F5]と[Ctrl] + [F5]を使用して調整できます。
l 時間間隔
カーソルを使用して、画像時間の両側に時間間隔を定義できます。 この時間間隔内で、すでに測定されたオブジェクトにラベルが付けられます。
|
(c) Grischa Hahn, Michel Jacquesson , 2009 |
オブジェクトの位置を保存
|
画像測定 - オブジェクトの位置を保存 |
測定ファイル
l ファイル名
測定ファイルの名前。 最新のWinJUPOS測定値(* .mea)または古いPC-JUPOS測定値(* .mes)を選択できます。 PC-SAPOS(* .sme)。 古いデータ形式では、Object-Id、Object description、Imageinfoを使用できません。
New HorizonsプローブのJupiter画像を測定する場合は、独自のWinJUPOS測定ファイル(拡張子.mea)に保存する必要があります。
l 観測者
測定ファイルに保存されている観測者の名前。 WinJUPOS測定ファイル(* .mea)では、この名前はファイル自体に保存されます。古いPC-JUPOSまたは PC-SAPOS測定ファイルの名前は、関連する観測者のリスト(* .beo)に保存されます。 画像定義で観測者名と混同しないでください。 この名前は、測定する画像のファイル名からのみ抽出され、それ以上使用されることはありません。
オブジェクト
l コード
l 領域
ウィンドウを開くと、リージョンコード (region code) には、回転システムと同様に、惑星の緯度に対応する値がすでに含まれています。 コードは特別なオブジェクトを考慮に入れています。
l Id
オブジェクトのユーザー定義のテキスト/コード。 モジュールデータ選択では、特別なオブジェクトを検索するために使用できます。 (英語、ASCII)
l 説明
オブジェクトの外観と動作に関する情報。 (英語、ASCII)
画像測定
l 画像情報
観測条件への情報。
l 測定コード
測定者名(ASCII)の3桁のコード。
l チャネル
使用されている観測チャネル(ASCII)の4桁のコード。
l 保存(Shift + Enter)
オブジェクトの位置を指定した測定ファイルに保存します。 ファイル内に同様のオブジェクトが同時に存在するかどうかがチェックされます。この場合、古い測定値を上書きするか、単に新しい測定値をファイルに追加するかを尋ねられます。
l 天体暦 (F8)
天体暦モジュールをDateおよびUTまで開始します。
l 閉じる(ESC)
ウィンドウを閉じて、すべての変更を保存します。
|
(c) Grischa Hahn, Michel Jacquesson , 2007 |
木星オブジェクトコード(JUPOS)
|
画像測定 - 木星オブジェクトコード(JUPOS) |
次のスキーマに従ってオブジェクトを分類する必要があります。
|
1番目の文字 |
明るいオブジェクトの場合はW |
|
暗いオブジェクトの場合はD |
|
|
赤いオブジェクトの場合はR |
|
|
緑のオブジェクトの場合はG |
|
|
青いオブジェクトの場合はB |
|
|
黄色のオブジェクトの場合はY |
|
|
シアンのオブジェクトの場合はC |
|
|
マゼンタオブジェクトの場合はM |
|
|
2番目の文字 |
前端の場合はP |
|
Cセンター |
|
|
オブジェクトの終わりに続くFが観察されました |
|
|
オブジェクトのS南端(測定値のみ) |
|
|
オブジェクトのN北端(測定値のみ) |
|
|
3番目の文字 |
(この情報が利用可能な場合) |
|
オブジェクトが簡単だった場合は1 |
|
|
オブジェクトが中程度の場合は2 |
|
|
オブジェクトが見えにくい場合は3 |
|
|
4〜9番目の文字 |
オブジェクトコード |
オブジェクトコード - 明るいオブジェクト
|
SPTR |
暗い円光に囲まれた小さな明るいスポット。 |
|
SPOT |
輝点が伸びすぎたり、長方形になったりしていない。 |
|
OVAL |
周囲よりも明るく、はっきりとした楕円形の大きな領域。 |
|
BAY |
ベルトの端にある大きくて通常は半楕円形の切り欠き。 |
|
NICK |
ベルトの端にある小さな半円状の切り欠きで、隣接するゾーンよりも明るいことがよくあります。 |
|
SECT |
ベルトまたはゾーンの明るい部分。 |
|
GAP |
ベルトのかなり伸びた、弱くなった、または欠けている部分。 |
|
RIFT |
通常45°..60°の角度で、広いベルトを横切る明るい線。 |
|
AREA |
拡張された明るく不規則な境界領域。 |
|
STRK |
非常に長方形の縞模様の明るいオブジェクト。 |
オブジェクトコード - 暗いオブジェクト
|
SDER |
明るい円光に囲まれた小さなダークスポット。 |
|
SPOT |
ダークスポットが伸びすぎたり、長方形になったりしていない。 |
|
BAR |
暗い長方形のオブジェクト。 |
|
FEST |
ゾーンを通過する暗いフィラメントまたは花綱。 フィラメントの一端または花綱の両端は、暗い帯の結露から発生する可能性があります。 |
|
PROJ |
ベルトの端に暗い突起があります。 丸みを帯びたこぶから先細りの物体まで、さまざまな形があります。 |
|
SECT |
ベルトまたはゾーンの暗い部分。 |
|
VEIL |
ゾーンまたは極域での拡張された暗い陰影。 |
|
DIST |
SEBの復活中に原則として現れる暗い一体型または橋のような構造。 |
|
COL |
ゾーン内の円柱状の暗いオブジェクトで、垂直またはわずかに傾斜しています。 |
|
STRK |
非常に長方形の縞模様の暗いオブジェクト。 |
次のオブジェクトには特別なコードを使用してください。
|
RS |
大赤斑 |
|
RSH |
大赤斑の北にあるSEBの空洞 |
|
WOS-FA WOS-BC WOS-DE |
長寿命のホワイトオーバル (White Ovals ) FA、BC、DE。 1998年から2000年まではOvalBEにも、それ以降はOvalBAにもWOS-BCを使用してください。 |
|
STRD |
古典的なSTrZ妨害 |
|
STZB |
STZの追加ベルト |
|
STRB |
STrZの追加ベルト |
|
NTRB |
NTrZの追加ベルト |
|
NTZB |
NTZの追加ベルト |
|
ZONE |
明るいゾーン。特別な場合の緯度測定にのみ使用されます。フィールド「ID」にゾーンの名前を書き留めてください(命名規則は領域コードを参照してください)。このオブジェクトコードは、測定でのみ使用できます。 |
|
BELT |
暗いベルト。特別な場合の緯度測定にのみ使用されます。「ID」フィールドにベルトの名前を書き留めてください(命名規則は領域コードを参照してください)。このオブジェクトコードは、測定でのみ使用できます。 |
|
SHAD |
木星の衛星の影 |
|
MOON |
木星衛星の円盤 |
|
IMPACT |
SL-9衝撃直後の暗い構造 |
|
(c) Grischa Hahn, 2013 |
土星オブジェクトコード(SAPOS)
|
画像測定 - 土星オブジェクトコード(SAPOS) |
次のスキーマに従ってオブジェクトを分類する必要があります。
|
1番目の文字 |
明るいオブジェクトの場合はW |
|
暗いオブジェクトの場合はD |
|
|
赤いオブジェクトの場合はR |
|
|
緑のオブジェクトの場合はG |
|
|
青いオブジェクトの場合はB |
|
|
黄色のオブジェクトの場合はY |
|
|
シアンのオブジェクトの場合はC |
|
|
マゼンタオブジェクトの場合はM |
|
|
2番目の文字 |
前端の場合はP |
|
Cセンター |
|
|
オブジェクトの終わりに続くFが観察されました |
|
|
オブジェクトのS南端(測定値のみ) |
|
|
オブジェクトのN北端(測定値のみ) |
|
|
3番目の文字 |
(この情報が利用可能な場合) |
|
オブジェクトが簡単だった場合は1 |
|
|
オブジェクトが中程度の場合は2 |
|
|
オブジェクトが見えにくい場合は3 |
|
|
4〜9番目の文字 |
オブジェクトコード |
オブジェクトコード - 明るいオブジェクト
|
SPTR |
暗い円光に囲まれた小さな明るいスポット。 |
|
SPOT |
輝点が伸びすぎたり、長方形になったりしていない。 |
|
OVAL |
周囲よりも明るく、はっきりとした楕円形の大きな領域。 |
|
BAY |
ベルトの端にある大きくて通常は半楕円形の切り欠き。 |
|
NICK |
ベルトの端にある小さな半円状の切り欠きで、隣接するゾーンよりも明るいことがよくあります。 |
|
SECT |
ベルトまたはゾーンの明るい部分。 |
|
GAP |
ベルトのかなり伸びた、弱くなった、または欠けている部分。 |
|
RIFT |
通常45°..60°の角度で、広いベルトを横切る明るい線。 |
|
AREA |
拡張された明るく不規則な境界領域。 |
|
STRK |
非常に長方形の縞模様の明るいオブジェクト。 |
オブジェクトコード - 暗いオブジェクト
|
SDER |
明るい円光に囲まれた小さなダークスポット。 |
|
SPOT |
ダークスポットが伸びすぎたり、長方形になったりしていない。 |
|
BAR |
暗い長方形のオブジェクト。 |
|
FEST |
ゾーンを通過する暗いフィラメントまたは花綱。 フィラメントの一端または花綱の両端は、暗い帯の結露から発生する可能性があります。 |
|
PROJ |
ベルトの端に暗い突起があります。 丸みを帯びたこぶから先細りの物体まで、さまざまな形があります。 |
|
SECT |
ベルトまたはゾーンの暗い部分。 |
|
VEIL |
ゾーンまたは極域での拡張された暗い陰影。 |
|
COL |
ゾーン内の円柱状の暗いオブジェクトで、垂直またはわずかに傾斜しています。 |
|
STRK |
非常に長方形の縞模様の暗いオブジェクト。 |
次のオブジェクトには特別なコードを使用してください。
|
SHAD |
衛星の影 |
|
MOON |
衛星のディスク |
|
ZONE |
明るいゾーン。特別な場合の緯度測定にのみ使用されます。フィールド「ID」にゾーンの名前を書き留めてください(命名規則は領域コードを参照してください)。このオブジェクトコードは、測定でのみ使用できます。 |
|
BELT |
暗いベルト。特別な場合の緯度測定にのみ使用されます。「ID」フィールドにベルトの名前を書き留めてください(命名規則は領域コードを参照してください)。このオブジェクトコードは、測定でのみ使用できます。 |
|
(c) Grischa Hahn, 2013 |
木星領域コード(JUPOS)
|
画像測定 - 木星領域コード(JUPOS) |
オブジェクトの緯度を分類するには、2桁のコードを使用する必要があります。 最初は文字、2番目は数字です。
|
|
1 |
2 |
3 |
4 |
5 |
|
A |
SPR |
SSSTZ |
SSSTB |
|
|
|
B |
SSTZ |
SSTB *) |
SSTBn |
|
|
|
C |
STZ |
STB |
WOS-FA |
WOS-BC |
WOS-DE |
|
D |
STBn |
|
|
|
|
|
E |
STrZ |
SEB(S) |
RS |
RSH |
|
|
F |
SEBs |
|
|
|
|
|
G |
SEB(C) |
|
|
|
|
|
J |
SEB(N) |
EZ(S) |
|
|
|
|
K |
EB |
EZ(C) |
|
|
|
|
L |
EZ(N) |
NEB(S) |
|
|
|
|
M |
NEB(C) |
|
|
|
|
|
N |
NEB(N) |
NTrZ |
|
|
|
|
P |
NTBs |
|
|
|
|
|
R |
NTB |
NTZ |
|
|
|
|
S |
NNTBs |
|
|
|
|
|
T |
NNTB |
NNTZ |
|
|
|
|
U |
NNNTB |
NNNTZ |
|
|
|
|
V |
NNNNTB |
NNNNTZ |
NPR |
|
|
*) True SSTB
その意味は・・・
|
RS |
大赤斑(GRS) |
|
RSH |
大赤斑のSEBくぼみ |
|
X(N), (C), (S) |
ベルトまたはゾーンXの北、中央、または南のコンポーネント |
|
Xn, s |
ベルトXの北、南端 |
以下に、木星大気の流れとジェット気流、それらの緯度、典型的なドリフト、および添付されたJUPOS領域コードを示します。 電流は「C」で終了し、ジェット気流はベルトの端で発生します。 アスタリスクでマークされた流れは、またニューホライズンズ宇宙船によってのみ観測されました。
|
現在/ジェット気流 |
Joviグラフィック緯度[°] |
コード |
ドリフト対[°/30d] |
システム |
|
SPC |
-90..-54 |
A |
|
2 |
|
* S6TBn |
-66 |
A |
-141 |
2 |
|
* S5TBn |
-61 |
A |
-57 |
2 |
|
* S4TBn |
-53 |
A |
-75 |
2 |
|
S3TC |
-52..-45 |
A |
-15..0.0 |
2 |
|
* S3TBn |
-43 |
A |
-105 |
2 |
|
SSTC |
-42..-38 |
B |
-33..-24 |
2 |
|
SSTBn |
-37..-36 |
B |
-90..-78 |
2 |
|
STC |
-36..-29 |
C |
-21..-9 |
2 |
|
* STBs |
-32 |
C |
+27 |
2 |
|
STBn |
-29..-27 |
D |
-150..-60 |
2 |
|
STrC |
-26..-13 |
E |
-6..+6 |
2 |
|
SEBs |
-20 |
F |
+60..+150 |
2 |
|
SIC |
-16..-11 |
G |
-150..-30 |
2 |
|
SEC |
-10..-5 |
J |
-111..+75 |
1 |
|
CEC |
-5..+5 |
K |
+3..+30 |
1 |
|
NEC |
+5...+10 |
L |
-6..+6 |
1 |
|
NIC |
+10..+16 |
M |
-159..-60 |
2 |
|
* NEBn |
+17 |
N |
+30 |
2 |
|
NTrC |
+14..+23 |
N |
-15..-6 |
2 |
|
NTBs |
+24 |
P |
-171..+60 |
1 |
|
* NTBn |
+31..+32 |
R |
+60 |
2 |
|
NTC |
+25..+34 |
R |
+12..+21 |
2 |
|
NNTBs |
+35..+36 |
S |
-96..-45 |
2 |
|
* NNTBn |
+39..+40 |
T |
+27 |
2 |
|
NNTC |
+37..+42 |
T |
-3..+3 |
2 |
|
* N3TBs |
+43 |
U |
-45 |
2 |
|
N3TC |
+44..+47 |
U |
-21..-9 |
2 |
|
* N4TBs |
+47 |
V |
-39 |
2 |
|
N4TC |
+49..+55 |
V |
-3..+3 |
2 |
|
* N5TBs |
+56 |
V |
-60 |
2 |
|
* N6TBs |
+64 |
V |
-63 |
2 |
|
* N7TBs |
+69 |
V |
-93 |
2 |
|
NPC |
+58..+90 |
V |
|
2 |
WinJUPOSで使用されている木星のドリフトプロファイルも参照してください。
|
(c) Grischa Hahn, 2009 |
土星領域コード(SAPOS)
|
画像測定 - 土星領域コード(SAPOS) |
オブジェクトの緯度を分類するには、2桁のコードを使用する必要があります。 最初は文字、2番目は数字です。
|
|
1 |
2 |
|
A |
SPR |
|
|
B |
SSTZ |
SSTB |
|
C |
STZ |
STB |
|
E |
STrZ |
SEB(S) |
|
G |
SEB(C) |
|
|
J |
SEB(N) |
EZ(S) |
|
K |
EB |
EZ(C) |
|
L |
EZ(N) |
NEB(S) |
|
M |
NEB(C) |
|
|
N |
NEB(N) |
NTrZ |
|
R |
NTB |
NTZ |
|
T |
NNTB |
NNTZ |
|
V |
NPR |
|
その意味は・・・
|
X(N), (C), (S) |
ベルトまたはゾーンXの北、中央、または南のコンポーネント |
|
Xn, s |
ベルトXの北、南端 |
したがって、使用されるリージョンコードと緯度におけるそれらの位置の間には関係があります。
|
ベルト/ゾーン |
プラネトグラフ。 緯度[°] |
コード |
システム |
|
SPR |
-90..-59 |
A1 |
3 |
|
SSTZ |
-59..-54 |
B1 |
3 |
|
SSTB |
-54..-46 |
B2 |
3 |
|
STZ |
-46..-36 |
C1 |
3 |
|
STB |
-36..-29 |
C2 |
3 |
|
STrZ |
-29..-28 |
E1 |
3 |
|
SEB(S) |
-28..-19 |
E2 |
3 |
|
SEB(C) |
-19..-18 |
G1 |
3 |
|
SEB(N) |
-18..-10 |
J1 |
1 |
|
EZ(S) |
-10..-4 |
J2 |
1 |
|
EB |
-4..+4 |
K1 |
1 |
|
EZ(C) |
-4..+4 |
K2 |
1 |
|
EZ(N) |
+4...+10 |
L1 |
1 |
|
NEB(S) |
+10..+18 |
L2 |
1 |
|
NEB(Z) |
+18..+19 |
M1 |
3 |
|
NEB(N) |
+19..+28 |
N1 |
3 |
|
NTrZ |
+28..+30 |
N2 |
3 |
|
NTB |
+30..+39 |
R1 |
3 |
|
NTZ |
+39..+45 |
R2 |
3 |
|
NNTB |
+45..+55 |
T1 |
3 |
|
NNTZ |
+55..+60 |
T2 |
3 |
|
NPR |
+60..+90 |
V1 |
3 |
WinJUPOSで使用されている土星のドリフトプロファイルも参照してください。
|
(c) Grischa Hahn, 2009 |
オプション
|
画像測定 - オプション |
画像の向き
画像方向SRおよびNRの通常の画像、画像方向SVおよびNVのミラー反転画像。
センサーマトリックス
l センサーエレメントの距離比(x / y)
一部のCCDマトリックス(カメラ)のセンサー要素は、高さと幅の距離が異なります。 例:CCDカメラのセンサーエレメントの距離は、幅10µm、高さ10.5µmです。 エッジの長さが1メートルの正方形が、幅100ピクセル、高さ95ピクセルのセンサーマトリックスに投影されます。 通常のモニターの正方形の画像を押します。 この影響を補正するには、センサー要素の距離比(x / y)に0.95(=センサー要素の幅の距離/高さの距離)の値を設定します。
l 不明
この値がわからない場合は、「不明 (Unknown) 」を選択してください。 1.0の値が想定されています。 アウトラインフレームの自動フィッティングが実行されると、最適値が計算されます(木星のみ)。
l 定義済み
下のマスクに既知の値を入力します。
全体設定
l クイックムーブ(全体設定)
主記憶容量(RAM)が非常に多い高速コンピューターを使用している場合は、クイック移動をアクティブ化できます。 これにより、現在のビューだけでなく、画像全体に対して画像操作が実行されます。
l 高画質(全体設定)
高速コンピュータを使用している場合は、このオプションをアクティブにして、ズームまたは回転した画像をより高品質で計算できます。
|
(c) Grischa Hahn, 2013 |
その他
|
画像測定 - その他 |
ここでは、画像測定に多かれ少なかれ役立つ一連の追加機能を見つけることができます。
距離
l 距離を測定
天体の2点をマウスの左ボタンでクリックします。 次に、ボタンの下にキロメートル単位の距離が表示されます。 計算では、2点を結ぶマゼンタの線を天体の表面に投影します。
地図の計算
この関数を使用すると、モジュール「マップ計算」を使用せずに、表示された画像からマップを計算できます。これは、特定のオブジェクトまたは領域の進化を説明するのに役立つ場合があります。
l テンプレート設定
![]() ボタンを使用して、マップを計算するための構成ファイルを選択します。
このファイルでは、画像設定は無視され、表示されている画像の設定に置き換えられます。
パスとファイル名を入力すると、このマップはこのサブディレクトリまたは表示された画像のサブディレクトリに保存されます。
他のすべての設定が考慮されます。
ボタンを使用して、マップを計算するための構成ファイルを選択します。
このファイルでは、画像設定は無視され、表示されている画像の設定に置き換えられます。
パスとファイル名を入力すると、このマップはこのサブディレクトリまたは表示された画像のサブディレクトリに保存されます。
他のすべての設定が考慮されます。
使用されるテンプレート設定はグローバルであり、画像測定設定とは無関係です。
![]() ボタンを使用すると、マップコンピューティングの設定を表示し、編集して、再度保存できます。
ボタンを使用すると、マップコンピューティングの設定を表示し、編集して、再度保存できます。
l マップをコンパイル
マップコンピューティングを開始します。 終了すると地図が表示されます。 その名前は[測定画像の名前 (Name of the measured image) ] _ [設定ファイルの名前 (Name of the settings file) ]。[測定画像の種類 (Type of the measured image) ]で作成されます。
マップには、常に表面全体または天体の半分が含まれています。 パーツのみを入手したい場合は、「IrfanView」などの「バッチ変換」を使用することをお勧めします。
l 送信パッケージを作成
ロードされた画像とその地図投影法をFITS形式で使用し、対応する測定設定(* .ims)と地図投影法データ(* .gts)を使用してZIPアーカイブを作成します。 さらに、画像とマップのパラメータはXMLファイルに保存されます。
l 画像スタックの設定ファイル(* .ims)を作成
現在の測定設定を一連の画像に転送し、関連する設定ファイル(* .ims)を作成します。 画像の平均キャプチャ時間はファイル名にエンコードされているか(画像の定義を参照)、GPSタグ付きのJPEGファイルとして利用できる必要があります。
天体の位置は画像上でずれることがありますが、そのサイズと向きは同じでなければなりません。
|
(c) Grischa Hahn, Michel Jacquesson , 2019 |
文献
|
画像測定 - 文 献 |
[1] Grischa Hahn:「惑星木星の図面、写真、CCD記録の自動評価」、卒業証書、ドレスデン工科大学、コンピューターサイエンス学部、画像処理および人工知能の議長、2000年
|
(c) Grischa Hahn, 2013 |