地図の計算
|
地図の計算 |
地図の計算 – 前書き
|
地図の計算 – 前書き |
モジュールマップ計算を使用すると、一連の画像から惑星の可視表面の投影マップを計算できます。 前提条件は、各画像、その露光時間、サイズ、および特別な向きが、画像測定モジュールの個別の設定ファイル(.IMS)によって事前に定義されていることです。 一貫性のある地図を作成するには、測定画面の輪郭フレームを惑星の真の手足に正確に調整することが不可欠です。
使用する画像測定
マウスの右ボタンで画像測定値のリストをクリックするか、[編集]ボタンをクリックすると、次のコマンドを含むコンテキストメニューが表示されます。
l 開く [Open]
関連する画像測定を開きます。
l 追加 [Add]
リストの最後に1つ以上の画像測定値を追加します。
l 削除 [Remove]
強調表示された画像測定値をリストから削除します。 設定ファイルは削除されません。
l (De-)アクティブ化 [(De-) Activate]
ハイライトされた画像測定をアクティブまたは非アクティブにします。 非アクティブなエントリは、マップの計算には使用されません。
l 更新(すべて) [Refresh (all)]
画像測定モジュール内の設定を変更し、それを.IMSファイルに保存した場合、それはマップ計算に自動的にロードされません。 このような変更を適用するには、[更新](すべて) [Refresh (all)] をクリックする必要があります。
l すべて削除 [Remove all]
リストからすべての画像測定値を削除します。 設定ファイルは削除されません。
l (De-)すべてをアクティブにします(または、列ヘッダー "+"をダブルクリックします) [(De-) Activate all (alternatively, double-click on column header "+")]
リストされているすべての画像測定値をアクティブまたは非アクティブにします。
l すべてを日付で並べ替え(または、列ヘッダー「画像測定」をダブルクリックします) [Sort all by date(alternatively, double-click on column header "Image measurement")]
すべての画像測定値を露光日とUTで並べ替えます。
l すべてC.M.で並べ替え (または、列ヘッダー「C.M.」をダブルクリックします) [Sort all by C.M. (alternatively, double-click on column header "C.M.")]
マップの回転システムで、すべての画像測定値を中央子午線の経度で並べ替えます。
l 最適な経度範囲を設定 [Set optimum longitude ranges]
まず、すべての画像測定値は、マップの回転システムで中央子午線の経度によって並べ替えられます。 次に、FromLとToLは、隣接する両方の画像のCMの中央に設定されます。
l 天体暦(F8) [Ephemerides (F8)]
画像露光の日時に天体暦モジュールを開きます。
すべての行の特定の列を同じ値に設定するには、それぞれの列ヘッダーをダブルクリックしてください。
画像測定のパラメータ
l +
画像測定のアクティブ化ステータス : チェック済み = アクティブ、チェックなし = 非アクティブ。
l 画像測定
画像測定の設定ファイル(.IMS)の名前。
l チャネル
使用するカラーチャンネル。
l B
輝度。
l C
コントラスト。
l G
ガンマ。
l LD comp. (周縁減光補正)
周縁減光の補正をオンまたはオフに切り替えます。 この補正は、ディスク全体で惑星画像の測光輝度のバランスを取ります。 周縁減光の程度は、太陽による照明の方向、惑星の表面の性質、および光の波長によって異なります。 以下にいくつかの特徴。
l 太陽 - 補正は可能ですが、最高の「LD値」です。 (以下を参照)は、カラーチャネルに強く依存します。
l 火星 - 補正は、火星の表面を表すため、赤およびさらに長い波長に対してのみ可能です。 より短い波長は、有用に修正することができない大気と雲を示します。 さらに、極冠はすべてのスペクトル範囲で有用な補正を拒否します。
l 月 - 補正は非常に遅い方法で可能です[3]。 全体的な明るさの違いが失われ、極端に明るい領域または暗い領域が減少します。 結果は、コントラストが低く、かなり「フラット」に見えます。 まず、「LD値」を調整する必要があります。 中程度のグレーレベルにし、コントラストを上げてみてください。
画像処理の過程で非線形または局所的な明るさの変換が適用された場合、周縁減光の補正は問題になるか、不可能にさえなります(月を除く)。
l LD val. (周縁減光値)
太陽の値1.0は、白色光の輝度プロファイルを意味します[2]。 他のすべてのボディの場合、1.0は、LAMBERT [1]による理想的な拡散ボディの反射プロファイルを表します。 多くの場合、最適な結果を得るには、この値を減らす必要があります。 月の場合は「LDval」。 グローバル輝度レベルに影響します。
l From L
参照系Syでカウントされた、[0°..360°]、月[-180°.. + 180°]の範囲のマップセグメントの最小経度。
l To L
参照系Syでカウントされた、[0°..360°]、月[-180°.. + 180°]の範囲のマップセグメントの最大経度。
l C.M.
システムSyの中央子午線。
l Sy.
マップの基本的な回転システム、レイアウト領域で変更できます。
l From B/B"
[-90°.. + 90°]の範囲のマップセグメントの最小緯度。
l To B/B"
[-90°.. + 90°]の範囲のマップセグメントの最大緯度。
一般的な地図設定
l 地図ファイル
計算する地図の画像ファイル名(オプション)。 出力は常にTrueColor24ビットです。
![]() 地図ファイルを選択
地図ファイルを選択
![]() 地図ファイルの名前を削除
地図ファイルの名前を削除
![]() 地図を表示(F4)
地図を表示(F4)
投影タイプ
計算するマップのタイプ
ランベルト正積円筒図法 : 平行投影を使用した赤道円筒図法
正距円筒図法 : 緯度と経度が等距離にスケーリングされた赤道円筒図法
極投影: 極平行投影
立体極投影: 緯度が等距離にスケーリングされた極投影
緯度スケール
「緯度」という用語の定義方法を決定します。
プラネトセントリック(B) [Planetocentric (B)] : 接続線の惑星の中心 - 表面点と赤道面の間の角度。
プラネトグラフィック(B ") [Planetographic (B")] : 表面点の接線に垂直な角度と赤道面(強い扁平率を持つ楕円体、特に木星と土星に使用)の間の角度。
地図の向き
どの極が円筒図法の上にある必要があるか、またはどの極が極投影で表示される必要があります。
レイアウト
l ページレイアウト
l マップ幅
ピクセル単位で測定されたマップの幅。 その右側は、画像情報の損失を回避する最適な幅(および括弧内の対応する高さ)です。
![]() 最適な幅を設定します。
最適な幅を設定します。
l 左端の経度...システム内
地図の左端の惑星中心経度の後に、基本的な自転系Syが続く。(金星、木星、土星については異なるシステムが存在するため、金星、木星、土星のみ)。歴史的な理由により自転系の定義が異なる場合があるので, 以下の地図は北を上にして, 左端の経度= 180°で計算した例である.
l 太陽、金星、天王星、冥王星
l 水星、火星、木星、土星、海王星
l 地球の月
l 画像セグメントの自動明るさと色補正
このオプションをオンにすると、WinJUPOSは個々の画像のすべてのカラーチャンネルの明るさのバランスを自動的に取ります。 これは、明るさ、コントラスト、ガンマの手動補正が適用される前に発生します。 これにより、明るさだけでなく色のバランスも得られます。
l 「画像ペアからの縦ドリフト判定」専用の明るさレベリング(遅い)
時折、周縁減光補正の通常の補正[1]は、エッジ効果なしで通常の明るさと色の側面を表示するのに十分ではありません。 ただし、この補正は、画像ペアからの縦方向のドリフトの決定にとって非常に重要です。 したがって、このオプションを使用すると、明るさの局所的な違いを維持しながら、グローバルチャートを強力に平準化する別のプロセス[3]があります。
マップをコンパイル
計算が完了するまでに時間がかかる場合があります。
地図は別のウィンドウに表示されます。 マップ上にマウスカーソルを移動すると、日付、UT、オブザーバー、および現在の座標がステータスバーに表示されます。 押す
![]() と、マウスカーソルの代わりに大きなクロスワイヤが使用されます。
と、マウスカーソルの代わりに大きなクロスワイヤが使用されます。
マップに関連付けられた関連データは、マップファイルと同じディレクトリにある.GTSファイルに保存されます。 したがって、このすべての補助情報は、モジュールツール - 画像ビューアでも利用できます。
設定
l リセット
マップ計算のすべての設定をデフォルト値にリセットします。
l 保存/ロード
マップ計算設定を保存またはロードします。 設定ファイルの名前(* .mcs)は、マップ計算ウィンドウのタイトルバーに表示されます。
|
(c) Grischa Hahn, Michel Jacquesson , Hans-Jörg Mettig, 2018 |
ページレイアウト
|
地図の計算 – ページレイアウト |
l ページの背景
適切な投影領域の外側の背景の色。スケールとキャプションに使用されます。
l 目盛り、サイズ、色
目盛りを描画する必要があるかどうか、その長さ(ピクセル単位)、および色を定義します。 目盛りとグリッドは、目盛りの位置と距離の点で一致しています。 スケールのチェックを外すと、エフェメリデスモジュールで使用されるテクスチャマップを作成する場合に便利です。
l 目盛り見出し
学位ラベル、回転システムに関する情報、緯度のタイプ、および投影を含めます。
フォントとそのサイズをで指定します ![]()
l 見出し
これにより ![]() 、地図の見出し、フォント、色、サイズを定義できます。
、地図の見出し、フォント、色、サイズを定義できます。
l 凡例
マップの凡例、そのフォント、色、サイズを定義 ![]() できます。 凡例には、日付、使用された画像測定のUTとオブザーバー、カラーチャネル、経度と緯度の制限が含まれます。
できます。 凡例には、日付、使用された画像測定のUTとオブザーバー、カラーチャネル、経度と緯度の制限が含まれます。
l 地図の背景
マップの背景の色。 これは、投影の内側であるが画像情報の外側の領域です。
l グリッド、増分、色
グリッドを描画する必要がありますか。 経度と緯度でのグリッド線の間隔はどれくらいですか。 そして彼らの色は何ですか?
l 著作権
あなたは著作権表示、そのフォント、色、サイズを定義
![]() することができます。 投影領域の右下隅に表示されます。
通知の背景色は、マップの背景色と同じです。
することができます。 投影領域の右下隅に表示されます。
通知の背景色は、マップの背景色と同じです。
|
(c) Grischa Hahn, Michel Jacquesson , Hans-Jörg Mettig, 2008 |
ドリフト補正
|
地図の計算 - ドリフト補正 |
ドリフト補正(木星と土星のみ)
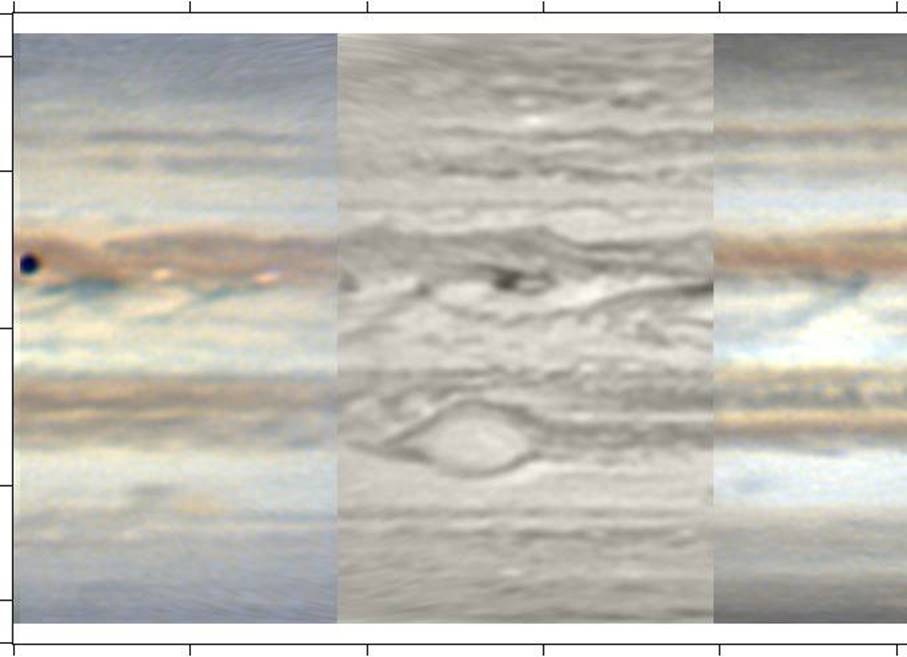
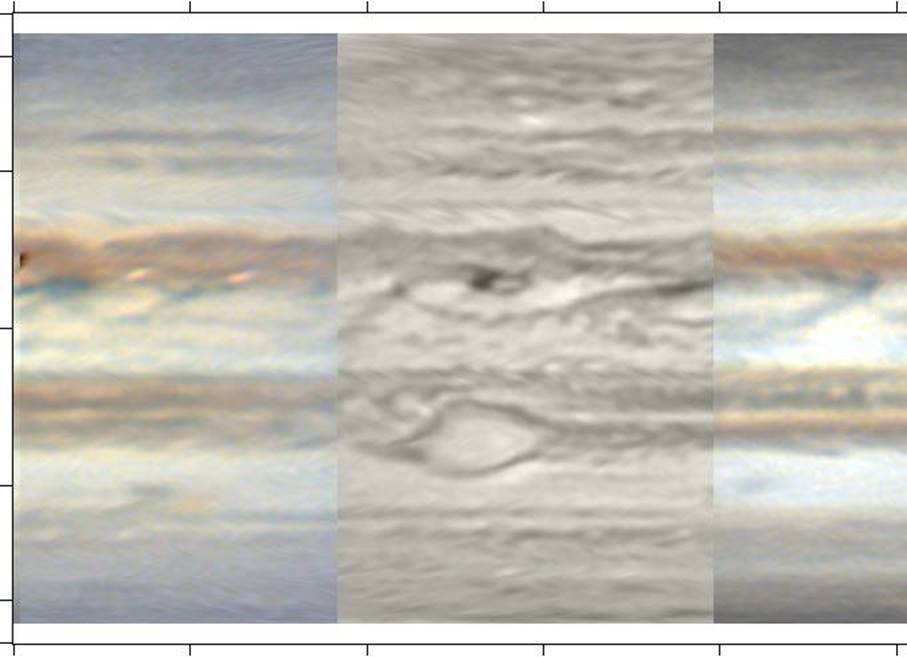
たとえば、10時間にわたる一連の観測から木星の星座早見盤を計算すると、赤道帯(システム1)の最初の画像と最後の画像の間の限界でオーバーラップの問題が発生します。 赤道構造がシステム2に対して約3°シフトするため、驚くことではありません。オプションのドリフト補正は、平均時間の平均ドリフトプロファイルを使用して各画像を調整するため、オーバーラップの問題は一般に補正されます。 これは、画像ペアからの縦方向のドリフトを決定して、より正確で明確な結果を得るのに役立ちます。
ただし、このオプションは、木星の回転(木星の場合は10時間)を超えて分離された画像で作成されたマップには使用しないでください。 木星ドリフトプロファイルは、GRSの場合はSEBジェット気流、WOS-BCの場合はSTBジェット気流でGRSとWOS-BCも調整します。これにより、全く異なる動きをする2つの天体が相互に変形する可能性があります。
元の地図
ドリフト補正付きの地図
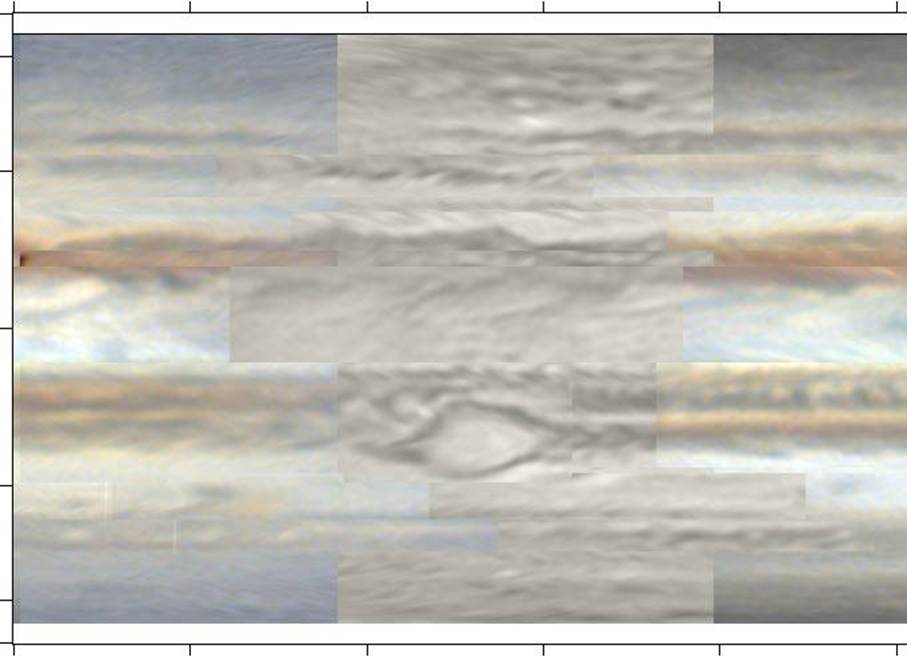
経度シフト(木星のみ)
サンプル経度シフトファイル(テキストファイル)
!
Longitude shift (drift) data for "weather forecast" maps
(Jupiter)
!
------------------------------------------------------------------
!
! Comments are marked with "!" at the beginning of a line.
!
! A subsequent line overrides the definition of a previous line for
the same
! latitude sector.
!
! B" : jovigraphic latitude
! L : jovigraphic longitude
! SiO : single object = [WOS-FA, WOS-BC,
WOS-DE, RS]
! L drift : average drift in longitude in deg/month in latitude
interval
! System : system of longitude/drift
!
!
! B" min B"
max L
min L
max L
drift System
! [Deg]
[Deg]
[Deg]
[Deg] [DegPer30Days]
[1|2|3]
!
[SiO+/-Deg] [SiO+/-Deg]
!
--------------------------------------------------------------------------
+34.0
+25.0
0.0
360.0
21
2
+22.0
+14.5
0.0
360.0
8
2
+11.5
-06.0
0.0
360.0
13
1
-06.0
-26.0
0.0
360.0
10
2
-27.0
-37.0
0.0
360.0
-16
2
-06.0
-29.0
RS-15.0
RS+80.0
0
2
-27.0 -37.0
WOS-BC-10.0
WOS-BC+20.0
-11
2
-37.0
-45.0
0.0
360.0
-28
2
!
--------------------------------------------------------------------------
30日後の大気のシミュレーションのための経度変化のある地図。
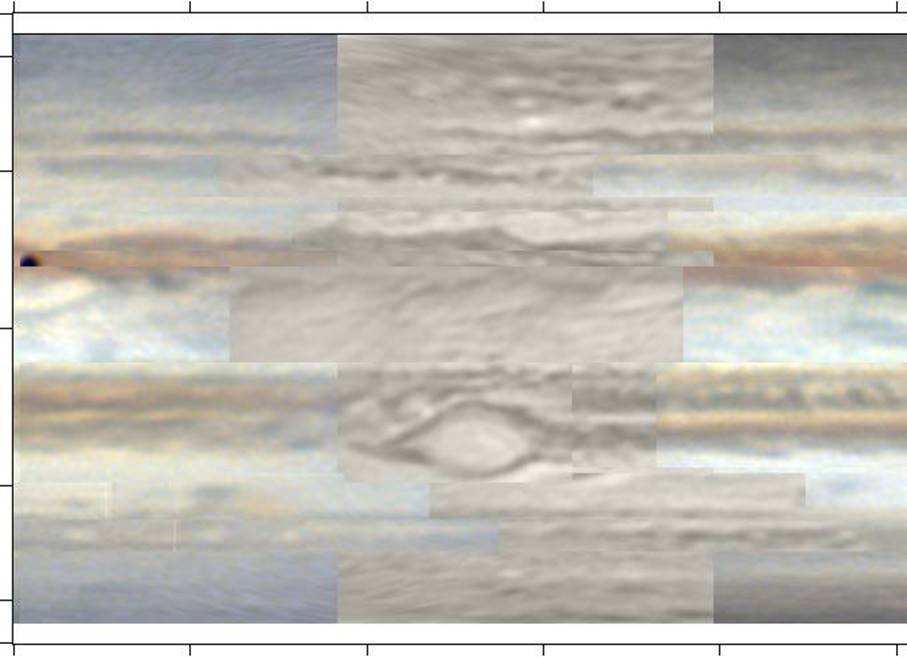
ドリフト補正も同様です。
|
(c) Grischa Hahn, 2016 |
補足事項
|
地図の計算 - 補足事項 |
[1] LAMBERTによる理想的な拡散反射体の輝度プロファイル
![]()
S0 - 曲面ベクトル/曲面点の法線(3D)、正規化された曲面ベクトル
I0 - 表面点の照明ベクトル(3D)、正規化
h - 表面点の通常の明るさ
hS - 表面点の観測輝度
[2] 白色光における太陽の明るさプロファイル
![]()
r - 太陽の中心からの表面点の観測されたデカルト距離(2D)、単位としての太陽の半径
h - 表面点の通常の明るさ
hS - 表面点の観測輝度
[3] 共通輝度補正
a. 元画像(OI)からアンシャープ画像(UI)を計算し,フィルタボックスのサイズは0.2*rで,rは天体の半径をピクセル単位で表します.
b. CI(x、y)= OI(x、y)+(hMax(UI)-UI(x、y))を使用して、明るさ補正された画像(CI)を計算します。
|
(c) Grischa Hahn, Michel Jacquesson , Hans-Jörg Mettig, 2008 |