詳細設定
詳細設定には、メインディスプレイの[脳のボタン]をクリックしてアクセスします。 PHD2には、ガイドパフォーマンスを最適化するために調整できるパラメーターの大きなセットがあります。 これらは「高度な」設定と呼ばれますが、特に理解するのは難しくありませんので、遠慮なく調べてください。 これらのフォームのすべてのフィールドには、「ツールヒント」、各フィールドを詳細に説明する小さなメッセージウィンドウが含まれています。 カーソルをフィールドに「ホバー」するだけでツールチップが表示されます。 多くの場合、これにより必要なすべての情報が提供されます。 使用可能なパラメーターが非常に多いため、PHD2の詳細ダイアログは、タブ名をクリックすることでアクティブになるノートブックタブに編成されています。 すべてのタブは、フォームの下部にある[OK]ボタンと[キャンセル]ボタンの共通セットを共有しています。 [OK]をクリックすると、任意のタブフィールドに加えられた変更が有効になります。 「キャンセル」をクリックすると、加えられた変更は破棄されます。
l 全体タブ
l カメラタブ
l ガイドタブ
l アルゴリズムタブ
¡ 単一方向ガイド
全体タブ
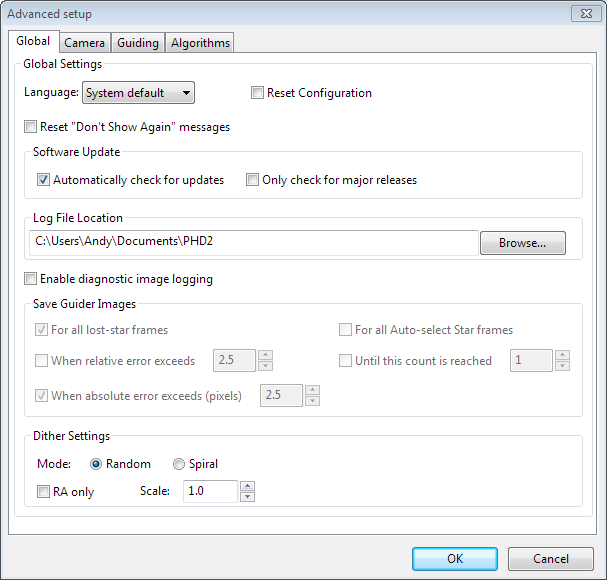
「全体」タブのコントロールは、それぞれのツールチップで十分に説明されていますが、完全を期すためにここにまとめています。
l Language-利用可能なローカリゼーションに応じて、PHD2ユーザーインターフェイスで使用される言語を決定します。 これを変更するには、プログラムの再起動が必要です
l 設定のリセット(Reset Configuration)-PHD2が新しくインストールされたかのように、すべての設定を初期値に復元します
l 今後表示しないメッセージをリセットする(Reset Don't Show Again messages) -以前に表示しないように選択した場合、アラートメッセージの表示を復元します
l ソフトウェアの更新(Software Update)
¡ 更新を自動的に確認(Automatically check for updates) -プログラムの起動時にPHD2がソフトウェアの更新を確認できるようにします
¡ メジャーリリースのみを確認(Only check for major releases)-ソフトウェアの更新を確認するときに開発ビルドを含めるかどうかを示します。
PHD2ソフトウェアアップデートの詳細については、ソフトウェアアップデートセクションを参照してください。
l ログファイルの場所(Log File Location)-PHD2ガイドログ、デバッグログ、および診断画像ファイルが保存されるディレクトリを指定します。 Windowsのデフォルトの場所は、ログインしているユーザーに関連付けられている「マイドキュメント」フォルダです。
l ディザー設定(Dither Settings)
¡ ランダムモード(Random mode)-PHD2に乱数ジェネレーターを使用してディザのサイズと方向の両方を計算するように指示します。RAのみのモードまたはDecガイディングモードが 'None'に設定されていることによって課せられる制約に従います。
¡ スパイラルモード(Spiral mode) -時計回りのスパイラルパターンで固定サイズの量でディザリングするようPHD2に指示します。 これは、イメージングカメラに大きな固定パターンノイズがある場合や、マウントに厄介な量のDecバックラッシュがある場合に適しています。
¡ ディザRAのみ(Dither RA only) -PHD2にRA軸のみをディザリングするよう指示します。
¡ ディザースケール(Dither scale) -画像アプリケーションで指定された最大ディザー量を調整するために使用されるオプションの乗数。 ディザリングを参照
l 診断画像ログを有効にする(Enable diagnostic image logging) -主に製品のサポートと、ガイドカメラまたはPHD2星の認識と測定に関する問題の診断に使用されます。ガイドフレーム画像は、グループボックスのフィルター/トリガーコントロールの対象となるFIT形式でキャプチャされ、ログに記録されます。画像はPHD2ログディレクトリのサブフォルダに保存され、日付と時刻はサブフォルダ名の一部としてエンコードされます。個々のガイドフレームは、画像がキャプチャされた時間とフレームが保存された理由を示すファイル名とともに保存されます。ガイドフレームはFIT形式で保存されるため、ヘッダーには露光時間などのその他の有用な情報が含まれます。ロギング機能は主にトラブルシューティングに使用されるため、画像のサブフォルダは30日後に自動的に削除されます。独自の目的で画像を保持する場合は、サブフォルダーの名前を変更するか、サブフォルダーを別のディレクトリにコピー/移動する必要があります。ロギングが「イベント」のいずれかによってトリガーされたとき-たとえば星の喪失または大きなエラー-画像のグループ(画像セット)が保存され、イベントをトリガーした画像を中心に保存されます。これは、異常な状態が発生する前と後の両方で、ガイドスターとガイドフレームがどのように見えるかを示すガイダー画像の記録を提供します。さまざまなトリガーとフィルタリングのコントロールを以下で説明し、コントロールのツールチップにも表示されます。
¡ すべてのロストスターフレーム(All lost star frames) -ロストスターの理由(低SNR、質量変化など)に関係なく、ロストスターイベントの画像セットを記録します。
¡ すべてのスターフレームの自動選択(All auto-select star frames) -結果に関係なく、スターの自動選択に使用されるフレームの画像セットを記録します。ユーザーインターフェースでの選択に関係なく、スターの自動選択に失敗すると、常にログに記録された画像になります。
¡ 相対エラーが次の値を超えた場合(When relative error exceeds) -現在のフレームの星のたわみが、隣接するスピンコントロールで選択された係数によって移動平均エラーを超えたときに、画像セットを記録します。たとえば、平均(RMS)エラーが0.5ピクセルで、現在のフレームのエラーが1.5ピクセルの場合、相対エラーは3です。
¡ 絶対エラーが次を超えた場合 (When absolute error exceeds) -星のたわみが隣接するスピンコントロールで指定されたピクセル数を超えたときに、画像セットを記録します。
¡ このカウントに達するまで(Until this count is reached) -隣接するスピンコントロールの値とカウントが一致するまで画像を記録します。制限に達すると、カウンターはゼロにリセットされます。
画像は業界標準の形式で保存されているため、表示または分析できる天文学関連のアプリケーションが多数あり、その多くは無料です。ほとんどの画像キャプチャおよび画像処理アプリケーションは、星や視野の光学的品質を詳細に測定できる他のより具体的なツールと一緒にそれを行うことができます。ウェブ検索を行うだけで、使用しているプラットフォームのFIT形式をサポートするアプリケーションのリストを見つけることができます。単に画像を見て焦点を確認したい場合、またはカメラから返された画像の一般的な品質を確認したい場合は、PHD2を使用できます。 PHD2がアイドル状態(ループもガイドもなし)の場合、保存したFIT画像の1つをメインウィンドウにドラッグアンドドロップするだけです。ディスプレイが更新され、ドロップした画像が表示されます。 PHD2をハードウェアに接続する必要はありません。ガンマスライダーを調整し、スターを(手動または自動で)選択し、スタープロファイルツールを使用して、選択したスターのHFDとプロファイルを表示できます。
カメラタブ
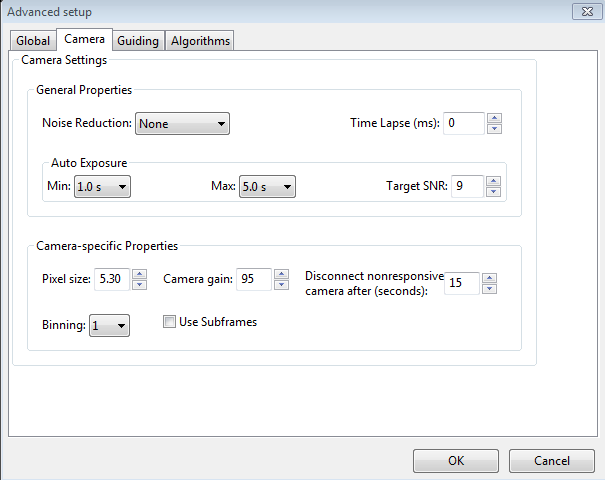
[カメラ]タブのコントロールは次のように使用されます。
l ノイズリダクション(Noise reduction) -ノイズの多いガイドカメラ画像(ダークフレームでは不十分)の処理に使用するアルゴリズムを指定します。 選択肢には、なし、2x2の平均、3x3の中央値があります。 2x2の平均値と3x3の中央値の両方で、ノイズが大幅に減少します。 3x3中央値は、ホットピクセルの削除に特に効果的であり、どちらもガイド精度に大きな影響を与えません。 ただし、不良ピクセルマップを作成する方が、かすかな星を検出する能力への影響が少ない、より優れたソリューションになる可能性があります。
l 時間経過(Time lapse)-ガイドの露出の間に固定遅延を課します。 これは、ガイドの露出が非常に短く、トラフィックレートが非常に高いマウントまたはカメラリンクに過負荷をかけたくない場合に役立ちます。
l 自動露出(Auto Exposure) -自動露出時間を制御する設定です。
¡ 最小露出(Min Exposure) -最小露出時間-PHD2は、ガイドスターのSNRが目標SNR値よりも高い場合でも、この値よりも短い露出時間を設定しません。最小露光時間の設定が短すぎると、表示効果が追いつかなくなり、ガイド結果が不十分になる可能性があります。 AOを使用すると、迅速な小さな修正が管理しやすくなるため、AOユニットのユーザーはこれを低い値に設定する場合があります。
¡ 最大露出(Max Exposure) -最大露出時間。ガイド星が選択される前に、PHD2は露出時間を最大値に設定します。ガイドスターが選択されると、PHD2は目的のSNRに達するまで露出時間を徐々に減らします。
¡ ターゲットSNR (Target SNR) -これは、PHD2が露出時間を調整することによって達成しようとする平均SNR値です。露出時間が固定されていても、SNRはフレームごとに変動する可能性があるため、目標SNR値を選択するときは、それを考慮してください。 PHD2は、SNRが3.0を下回るとフレームを拒否します。デフォルト値の6.0では、SNRが3.0を下回る原因となる変動を防ぐのに十分なクッションが提供されますが、より高い値が望ましいです。 「基本的な使用法」のセクションで述べたように、SNRは測光で使用される信号対雑音比と似ていますが、同一ではありません。
l ピクセルサイズ(Pixel size) -ミクロン単位のガイドカメラピクセルサイズ。これは、ガイダー画像のスケールを計算するためにPHD2が必要とする2つのパラメーターの2番目であり、したがって、ガイダー統計を秒単位で報告します。これに必要なもう1つのパラメーターは、[ガイド]タブにあるガイドスコープの焦点距離です。ピクセルサイズの正しい値を確認するには、カメラのドキュメントを参照してください。カメラに非正方形ピクセルがある場合は、寸法の1つを選択するか、2つの寸法の平均を入力します。ピクセルサイズはガイド精度に影響を与えないため、ユーザーインターフェイスの少しの不正確さは問題を引き起こしません。このダイアログのビニング設定を使用してカメラのビニングを制御している場合、ピクセルサイズはネイティブのビニングされていないサイズにする必要があります。注:カメラとカメラドライバーがピクセルサイズをPHD2に報告できる場合、このコントロールは無効になる場合があります。その場合、無効化されたコントロールに表示される値は、デバイスから報告されたピクセルサイズを表しています。 PHD2ではなくカメラドライバーレベルでビニングファクターも指定している場合は、結果として報告されるピクセルサイズが変わる可能性があります。一般に、PHD2を使用してビニングを設定することをお勧めします(以下を参照)。
l カメラゲイン(Camera gain)-この機能をサポートする多くのカメラのゲインレベルを設定します。このパラメータを減らすと、ノイズレベルを下げることができます。または、飽和せずに明るい星を使用できる場合があります。値の範囲とその特定の効果は個々のカメラに依存するため、このPHD2パラメーターは、カメラでサポートされる最小ゲイン値と最大ゲイン値の間の範囲のパーセンテージとして扱われます。たとえば、カメラが40〜80の範囲の絶対ゲイン値を使用する場合、50%のPHD2ゲイン値は60のカメラゲインに変換されます。
l 数秒後に応答しないカメラを切断する(Disconnect nonresponsive camera after (seconds)) -USB接続の不良が原因で、カメラの誤動作が発生することがあります。多くの場合、カメラは要求された画像データを返さず、PHD2は「ハング」しているように見えます。このパラメーターは、予想される露出時間が経過した後、PHD2が応答を待機する時間を決定します。たとえば、タイムアウト値が5秒で、露出時間が2秒の場合、PHD2は応答を最大7秒待つように指示します。その期間内にデータが受信されない場合、PHD2は操作を停止し、カメラを切断し、メインウィンドウに警告メッセージを表示します。ハードウェアの問題が根本的な問題である可能性が高いため、この回復の試みは常に成功するとは限りません。偽の回復アクションを回避するために、これらのタイムアウト値に寛大でなければなりません。また、電子機器をメインのイメージングカメラと共有するガイドカメラを使用している場合は、このタイムアウトを大きな値に設定する必要があります。メインのイメージャからのフルフレームのダウンロードに予想される最大時間をはるかに上回ります。これは、Sequence Generator Proに同梱されているSBIGドライバーのユーザーに対する考慮事項です。 PHD2が状況を適切に処理できるかどうかに関係なく、根本的な問題はほぼ確実にハードウェアまたはカメラドライバーにあり、ガイドを続行する前に解決する必要があります。
l ビニング(Binning) -オンチップ(ハードウェア)ビニングをサポートするカメラでは、ガイド露出を取得するときに使用されるビニングを指定できます。詳細については、以下を参照してください。このコントロールは、カメラがオンチップビニングに対応し、カメラがPHD2に接続されている場合にのみ表示されます。
l サブフレームを使用(Use subframes)-この機能をサポートするカメラの場合、PHD2は各ガイド露出のサブフレームのみをダウンロードします。これは、ダウンロード時間が遅いカメラで非常に役立ち、ガイドのためにより効果的に使用できます。この機能は、キャリブレーションとガイドの両方に適用されます。スターを選択せずに最初のループを行うと、フレーム全体がダウンロードされますが、スターを選択すると、この小さなサブフレームのみがダウンロードされます。サブフレームを使用していて、フレーム全体を表示して別の星を選択したい場合は、Shiftキーを押しながら画像表示ウィンドウの任意の場所をクリックします。
ビニングの使用
PHD2で利用可能なガイドカメラの一部は、ハードウェアレベルのビニングをサポートしています。これは、長い焦点距離でガイドしている場合や、非常に小さなピクセルのガイドカメラがある場合に役立ちます。 これらのシナリオでは、かすかなガイド星を使用する必要が生じることが多く、ガイダー画像が大幅にオーバーサンプリングされる場合があります。 オーバーサンプリングは実際の利点を提供せず、かすかな星の円盤を多くの小さなピクセルに投影すると、信号対雑音比(SNR)が低くなる可能性があります。 画像をビニングすることにより、カメラの読み取りノイズの影響を軽減し、SNRを改善できます。 オーバーサンプリングしている場合でも、ガイド星の位置の計算精度を低下させることはありません。 1より大きいビニングファクターを選択すると、次の効果があります。
1. スター画像の方がSNRが高く、バックグラウンドノイズレベルを超えて検出しやすくなります。 これは、使用する星が弱い場合(つまり、SNR値が約10未満の場合)に特に役立ちます。
2. カメラからダウンロードされるデータの量は、ビニングファクターの2乗によって削減されます。 これは、星の明るさとSNRがビニングされていない画像ですでに妥当である場合でも、USBリソースを大量に使用するカメラを使用している場合に役立ちます。 もちろん、星が選択されると、サブフレームを使用しても同じ結果が得られます。
3. ガイダー画像の解像度(画像スケール)は、ビニングファクターによって減少します。 これは、ビニングされていない画像のスケールが1 arc-sec / pixel未満の場合は問題にはなりませんが、ビニングされていない画像のスケールが3 arc-sec / pixelを超える場合は、ガイド結果が損なわれる可能性があります。 結果はメインのカメラシステムの画像スケールにも依存するため、実験が必要になる場合があります。
各ビニングレベルには、独自のダークフレームと不良ピクセルマップが必要です。これらを交換したり、変換を自動的に行ったりすることはできません。 ビニング設定を交互に切り替える柔軟性が必要な場合は、ビニング値ごとに個別のプロファイルを作成する必要があります。 次に、これらのプロファイルごとにダークライブラリと不良ピクセルマップを作成します。 ビニングファクターを変更する場合は、必要な設定を持つプロファイルに切り替えるだけで、ダークライブラリや不良ピクセルマップが利用可能になります。 カメラが正しくビニングしていることを確認する場合は、[統計]ウィンドウを使用して、フレームサイズと現在のカメラのビンの設定を確認できます。
ガイドタブ
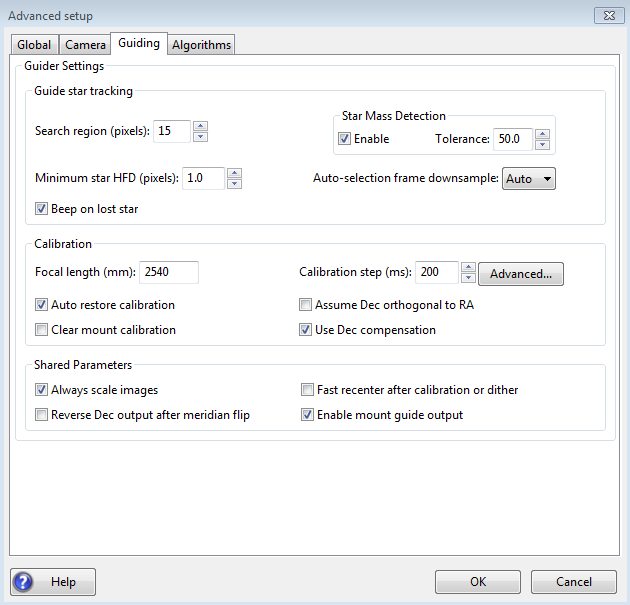
ガイドタブには、キャリブレーション、スタートラッキング、およびすべてのガイドアルゴリズムで共有されるガイド動作に使用されるパラメーターが表示されます。
ガイド星追跡
l 検索領域(Search region)-「トラッキング長方形」のサイズをピクセル単位で指定します。マウントがうまく機能しない場合、またはより一般的には、天体ポールにうまく配置されていない場合は、この値を増やす必要があります。ガイドスターを失うことなくバックラッシュ測定を実行できるように、ガイディングアシスタントの使用中に一時的に値を上げることもできます。検索領域が大きすぎると、複数の星がその境界内に住む可能性が高まり、ガイドの問題につながる可能性があることを覚えておいてください。
l 星の質量検出(Star mass detection)-PHD2に、ガイド星の明るさとサイズを空の背景と比較して監視するように指示します。細かい画像スケールを使用していて、この機能のためにロストスターイベントが多すぎる場合は、この機能を無効にするか、許容値を大きな値に設定する必要がある場合があります。
l スター質量許容値(Star mass tolerance)-「有効」ボックスがチェックされている場合、測定された明るさとサイズがこのパーセンテージを超えて変化すると、PHD2は「ロストスター」エラーをトリガーします。これは、追跡する四角形の中に2つの星があり、PHD2が誤って星を切り替えないようにする場合に役立ちます。また、薄い雲、高いカメラノイズ、アルファパーティクルアーティファクトによるエラーを防ぐこともできます。しかし、かすかな星を案内している場合は、信頼できない可能性があります。スターがディスプレイにはっきりと表示されているときに「ロストスター」エラーが多すぎる場合は、この設定の値を大きくしてみてください。 「有効」チェックボックスをリセットするか、しきい値を100に設定すると、警告が完全に無効になります。
l Minimum star HFD-適切なガイドスターの最小半フラックス直径(恐らく「サイズ」)を指定します。これは、PHD2がホットピクセルのまとまりを使用可能なガイドスターとして誤って識別しないようにするためのおそらく最良の方法です。ホットピクセルだけではないことがわかっている小さな星を手動で選択し、スタープロファイルツールを使用してそれらの星のHFD値を確認することにより、システムに適した値を決定できます。正当なかすかな星を選択できるがホットピクセルは選択できない最小HFD値を指定する必要があります。 PHD2がホットピクセルをガイドしようとしている状況に遭遇した場合は、必ずこのパラメーターを設定してください。
l 自動選択フレームダウンサンプル(Auto-selection frame downsample) -PHD2ガイド星の自動選択が奇形の星を認識しないという異常な状況で使用できます。これが発生した場合は、1より大きい値を試して、そのような星を認識する可能性を高めることができます。ほとんどのユーザーの場合、このプロパティはデフォルト値の「Auto」のままにしておく必要があります。
l ロストスターのビープ音(Beep on lost star) -ガイド中にガイドスターが失われたときに、PHD2がビープ音を鳴らすかどうかを指定します。
キャリブレーション
l 焦点距離(Focal length)-ガイドスコープの焦点距離(ミリメートル)。これは、画像のスケールを計算するためにPHD2が必要とする2つのパラメーターの1つを提供し、それにより、秒単位のガイドパフォーマンスを報告します。これに必要な他のパラメーターは、「カメラ」タブにあるガイドカメラのピクセルサイズです。これらの2つのパラメーターが適切に設定されていない場合、デフォルトのガイドパラメーターの一部が正しく設定されていない可能性があり、ガイドのパフォーマンスを評価して問題の解決を支援することに障害が生じます。 new-profile-wizardを使用する場合、これらの値はおそらく正しいでしょう。
l キャリブレーションステップサイズ(Calibration step-size)-PHD2がキャリブレーション中に使用するガイドパルスの持続時間を指定します。その使用法は、「基本的な使用法」ヘルプページの「自動キャリブレーション」セクションで説明されています。キャリブレーション中にガイド星の動きが速すぎるか遅すぎるかに応じて、値を調整できます。一般的なガイドラインとして、天の赤道から約30度以内(赤緯= 0)でキャリブレーションし、各方向に8〜14ステップになるキャリブレーションステップサイズを使用することをお勧めします。このコントロールの右側にある[詳細...]ボタンをクリックすると、適切な値を計算するのに役立つダイアログが起動します(以下を参照)
l 自動復元キャリブレーション(Auto restore calibration)-機器が接続されるとすぐに最新のキャリブレーションデータを自動的にリロードするようにPHD2に指示します。 ASCOM(またはIndi)マウント接続を使用している場合、または「aux-mount」接続を使用している場合は、このオプションを設定できます。逆に、PHD2に使用可能なスコープポインティング情報がない場合、このオプションは通常リセットされます。新規プロファイルウィザードは、このオプションの設定方法を尋ねてきます。自動復元は個別の機器プロファイルごとに記憶され、プロファイルを読み込んで機器に接続したときにのみ有効になることに注意してください。個別のガイドセッションが始まる前に再キャリブレーションを強制したい場合は、マウントキャリブレーションをクリアするだけです(下記参照)。自動復元オプションを設定した場合は、ガイドカメラがガイドスコープまたは空に対して回転していないことを確認する必要があります。
l RAに直交するDecを想定(Assume Dec orthogonal to RA)-通常、キャリブレーションプロセスは、赤経と赤緯の両方のカメラ角度を個別に計算します。これらの値に大きな精度を設定する必要はなく、デフォルトの動作は通常はうまく機能します。ただし、マウントに非常に高い周期誤差がある場合、または非常に悪い視界条件に対処している場合は、RAと偏角を垂直に強制することができます。このオプションを選択した場合、PHD2はRAのカメラ角度を計算し、それに直交する赤緯角度をアサートします。
l マウントキャリブレーションのクリア(Clear mount calibration)-PHD2に、現在マウントに使用されているキャリブレーションデータをクリアして、ガイドを再開する前に再キャリブレーションするように指示します。これは、さまざまな理由で行う可能性があります。たとえば、ガイドカメラを回転させたり、マウントガイドの速度を変更したりします。また、メインページのPHD2 /ガイドアイコンをShiftキーを押しながらクリックすると、同じ結果が得られ、再キャリブレーションが強制されます。
l 偏角補正を使用(Use Declination Compensation)-PHD2がASCOM接続(「マウント」または「補助」)を介してマウントからポインティング情報を取得できる場合、現在の偏角に基づいてRAガイドレートを自動的に調整します。異常な場合を除いて、このボックスは通常チェックされたままにしておく必要があります。たとえば、SiTechマウントコントローラーは自動的に補正を適用する場合があります。その場合、ボックスをオフのままにする必要があります。このオプションを、完全に異なる機能である「偏角バックラッシュ補正」と混同しないでください。
共有ガイドパラメータ
l キャリブレーションまたはディザリング後の高速リセンター(Fast re-center after calibration or dither) -キャリブレーションまたはディザリング中に、マウントが初期の「ロック」位置からかなり離れた位置に移動する場合があります。このチェックボックスをクリックすると、PHD2はガイドアルゴリズムの[最大継続時間]設定とトラッキング領域のサイズで許可されている最大のガイドコマンドを使用して、マウントをロック位置にできるだけ早く戻します。これは最適化にすぎないため、このチェックボックスの使用は完全にオプションです。高速再中心化中に星が失われたためにキャリブレーションが失敗することが多い場合は、このオプションを無効にする必要があります。この種の問題は、RAに大きな極座標調整エラーまたは過度の周期的エラーがあることを示している可能性があります。 Guiding Assistantを実行して、問題の原因を確認できます。
l 子午線反転後の逆Dec出力(Reverse Dec output after meridian flip)-子午線反転後に校正データを調整する方法をPHD2に指示します。一部の新しいマウントでは、「桟橋の側面」の状態を追跡し、赤緯モーターの方向を自動的に逆にします。古いマウントはこれを行いません。どちらの場合でも、PHD2は、マウントがピアのサイドに基づいてその動作を自動的に変更するかどうかを知る必要があります。この点でマウントの動作に関する情報を見つけるのが難しい場合があるため、PHD2には子午線反転キャリブレーションツールが用意されており、正しい設定を自動的に決定します。また、この簡単な実験で手動で設定を把握することも簡単です。
¡ チェックボックスをオフにして、桟橋の片側で調整し、マウントを反対側に移動します。
¡ ASCOMまたはIndiを介してガイドしている場合、または「補助マウント」接続を使用している場合は、ガイドを開始します。
¡ ST-4のみを使用してガイドし、PHD2にスコープポインティング情報がない場合は、まず[ツール]メニューの[フリップキャリブレーション]を選択してから、ガイドを開始します。
¡ どちらの場合でも、ガイドが正常に機能する場合は、ボックスをオフのままにします。 だが
¡ 暴走の偏角の誘導が見られる場合は、ボックスをチェックして、キャリブレーションを含む手順全体を繰り返します。
l マウントガイド出力を有効にする(Enable mount guide output)-PHD2にガイドにマウントコマンドを送信するよう指示するため、これは通常チェックされます。しかし、通常はマウントの修正されていない動作を観察するために、これを無効にしたい場合があります。たとえば、マウントの周期的エラーの一般的な形状と振幅を確認したり、極の不整合によるドリフトの量を確認したりするために、ガイダー出力を無効にすることができます。ほとんどの場合、これらの目的のためにこの設定を自動的に処理するガイドアシスタントを実行したほうがよいでしょう。
l マウントスルー時にガイドを停止(Stop guiding when mount slews)-スルーステータスを誤って報告する可能性があるASCOMマウントドライバーを操作するための診断オプション。マウント用のドライバーにこの問題があることがわかっている場合を除いて、このオプションはオンのままにしておく必要があります(ほとんどありません)。また、一般に、ハンドコントローラーによって開始されたスルーを検出しません。いずれの場合でも、PHD2は引き続きガイド星を追跡しようとします。そのため、スルーすると、通常、星が失われたという通知(PHD2画像ウィンドウのビープ音と点滅)が発生します。
詳細キャリブレーションパラメーター
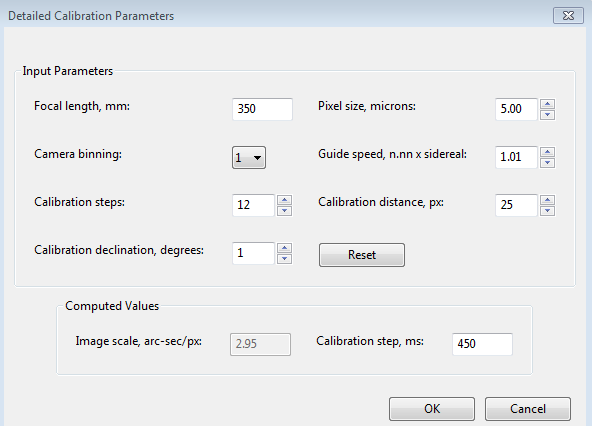
キャリブレーションパラメーターを確認または変更するには、一番上の4つの編集コントロールが正しく入力されていることを確認してください。すでに[グローバル]タブと[カメラ]タブで(または新しいプロファイルを使用して)焦点距離とカメラのピクセルサイズをすでに指定している場合 -wizard)、これらのフィールドはすでにこのフォームに入力されています。 マウントへのASCOM接続を使用している場合、「ガイド速度」と「キャリブレーションの偏角」のフィールドには、ドライバーが正しく報告しない限り、通常は正しい値が表示されます。 それ以外の場合は、自分で指定する必要があります。 ガイド速度は恒星速度の倍数として指定されます-ほとんどのマウントは1Xまたは0.5X恒星のようなものを使用しますが、他のものを選択できます。
<注意> ここでガイド速度設定を変更しても、マウントのガイド速度設定は変更されません。これは、マウントドライバーまたはハンドコントローラーを介してのみ実行できます。 このフィールドがすでに入力されている場合、フィールドを変更しても効果はありません。
「キャリブレーションステップ」フィールドをデフォルト値の12のままにしておくと、適切なキャリブレーションが得られる可能性があります。大幅に小さい値を使用すると、エラーまたは小さなマウントエラーが発生して、キャリブレーションエラーが発生する可能性が高くなります。デフォルト値の25pxが不適切であると考える何らかの理由がある場合は、合計キャリブレーション距離を変更することもできます。 「大きい」が常に「良い」とは限らないため、これには注意する必要があります。必要なキャリブレーション距離が大きいほど、キャリブレーションはRAの大きな未修正の周期誤差または12月の大きなドリフトの影響を受けやすくなります。これらのフィールドの値を変更すると、PHD2は現在の画像スケールとキャリブレーションの推奨値を再計算します刻み幅。次に[OK]をクリックすると、その値が[ガイド]ダイアログのキャリブレーションステップサイズフィールドに挿入されます。 [OK]をクリックすると、[ガイド]タブと[カメラ]タブの焦点距離とカメラのピクセルサイズのフィールドにも入力されるため、計算機で行った変更はそこにも反映されます。ただし、計算機ダイアログで[キャンセル]をクリックすると、この操作は行われません。繰り返しになりますが、PHD2は、「ガイド速度」フィールドに何が入力されていても、マウントのガイド速度設定を変更することはありません。
計算機の目標は、時間を無駄にせずに正確なキャリブレーションが得られる可能性が高いステップサイズを推奨することであり、自動的に計算された値は通常はうまく機能します。 警告メッセージが表示されずにキャリブレーションが成功している限り、キャリブレーションパラメーターはそのままにしておく必要があります。 new-profile-wizardを使用して機器プロファイルを作成したことがある場合、[詳細]ボタンと[キャリブレーションパラメーター]ダイアログを使用する理由はほとんどありません。
アルゴリズムタブ
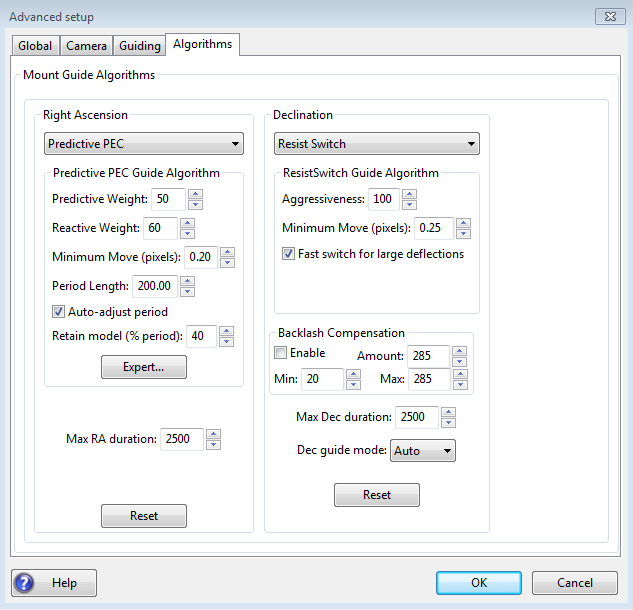
アルゴリズムタブを使用して、使用するガイドアルゴリズムを選択し、それらに関連するパラメーターを微調整できます。 アルゴリズムの選択を変更すると、表示されるパラメーターが大幅に変化します。 そのため、ガイドアルゴリズムに関連するすべてのパラメーターは、別々のセクションで一緒に扱われます。
残りのコントロールは、ガイドアルゴリズムの選択に依存しないもので、以下で説明します。
l 最大RA持続時間(Max RA duration)-右昇天で許容される最大ガイドパルス持続時間を指定します。スプリアスイベント(突風、ホットピクセルなど)によって引き起こされる可能性のある大きな偏向を追いかけたくない場合は、これをデフォルト値よりも小さくすることができます。ただし、ホットピクセル(最小星HFD)から保護している場合は、変更する正当な理由はほとんどありません。
l バックラッシュ補正(backlash Compensation)-これは、偏角ガイドの方向を逆にする必要があるときにPHD2が補正係数を適用するかどうかを制御します。以下のセクションを参照してください。
l Max Dec duration-偏角の最大許容ガイドパルス時間を指定します(上記と同じですが、偏角の場合)。
l 赤緯ガイドモード(Declination guide mode)-赤緯ガイドをさらに制御できます。エラーはマウントのギアの欠陥が原因ではないため、赤緯ガイドはRAガイドとは異なります。代わりに、偏角の偏向は、主に不完全な極整列またはたわみの結果です。結果は、以前の修正によるオーバーシュートがないと仮定すると、スムーズでほとんど一方向のエラーになります。 「auto」のデフォルト値は、さまざまなガイドアルゴリズムの動作に従って、方向の一部の反転が許容されることをPHD2に通知します。ただし、マウントに深刻な偏角がある場合は、方向の反転を完全に防止する必要があります。次に、「北」または「南」のいずれかを選択して、修正をその方向のみに制限できます(一方向の12月ガイド)。ただし、これらのモードのいずれかを使用した補正でのオーバーシュートは、長時間にわたって星の位置をオフターゲットのままにする可能性があることに注意してください。そのため、方向の反転を許可しない場合は、積極的なパラメータを控えめに使用することをお勧めします。最後に、ここで「オフ」を選択すると、赤緯ガイドが完全に無効になります。これは、Decガイドをサポートしない単純な追跡マウントに適切な選択です。
l Reset-選択したRAまたはDecアルゴリズムのガイドパラメーターをデフォルト値にリセットします。最小移動設定は、新しいプロファイルウィザードで採用されているのと同じアルゴリズムを使用して設定されます。以前にガイディングアシスタントを使用して最小移動設定を調整したことがある場合は、おそらくその手順を繰り返す必要があります。
偏角バックラッシュ補正
最も一般的に使用されるマウントは、偏角にある程度のバックラッシュがあります。これにより、Decガイドコマンドの方向が変更されるたびに遅延が発生します。この間、赤緯歯車は完全にはかみ合わず、ガイドコマンドに応じて軸は動きません。多くのマウントにはバックラッシュ補正の設定がありますが、これらはガイドに使用するべきではありません-それらは通常、視覚的使用のみを目的としています。任意の時点で必要とされる実際の補正量は、ポインティング位置とシステムの機械的負荷に依存する可能性があるため、固定値は通常、安定しない振動をもたらします。 PHD2によって実装されるバックラッシュ補正は適応型です。つまり、測定結果に応じて補正量が上下に調整されます。この機能を有効にする前に、ガイディングアシスタントを実行して偏角バックラッシュ(偏角の方向を完全に反転させるために必要な時間遅延)を測定する必要があります。マウントのガイド速度設定が高いほど(0.9x恒星など)、この遅延は小さくなることに注意してください。測定量が3秒以下の場合、ガイディングアシスタントはバックラッシュ補正を試すことをお勧めします。その推奨事項を適用すると、バックラッシュ補正設定が自動的に処理されます。バックラッシュ補正のUIコントロールには、「最小」および「最大」の補正量の設定が含まれます。これらは、開始補正値に対して行われる調整の範囲を効果的に制限します。マウントの動作に慣れている場合は、これらの設定を手動で調整して、補正が適切に機能することがわかっている範囲内に収まるようにすることができます。それ以外の場合は、デフォルト値のままにしておく必要があります。バックラッシュが数秒未満で、マウントに他の重大な機械的問題がない場合、バックラッシュ補正アルゴリズムは一般にうまく機能します。 Decギアシステムの初期状態は不明であるので、ガイドを開始するときに短い不安定さが予想されます。実際にイメージングを開始する前に安定させてください。 12振動の周期が繰り返し発生する場合や、軸が安定しない場合は、補正機能を無効にして、デバッグログファイルをPHD2サポートフォーラムに送信してください。多くの場合、Decのバックラッシュ補正の正しい量は、スコープのポインティング位置によって変わることに注意することが重要です。これは、Decの軸の不均一なギアの摩耗、または軸に加えられている重力負荷の違いが原因である可能性があります。
単一方向赤緯ガイダンス
他の場所で説明したように、一部のマウントは赤緯の反動が大きすぎて、南北両方向のガイドをサポートできません。この状況は、PHD2を構成して、片方向のDecガイディングと呼ばれる一方の方向のみをガイドすることで緩和できます。偏角ガイドはゆっくりとしたドリフト(極の位置合わせのずれによって生じるエラー、および程度は低いものの機械的なたわみ)を修正することのみを目的としているため、これは扱いやすい状況になる可能性があります。皮肉なことに、ドリフトの方向がわかりやすくなり、一方向のガイドに干渉する可能性を減らすために、極の配置を少しデチューンしたい場合があります。極座標の不整合は、通常、ガイドパフォーマンスを低下させることはありません。代わりに、ポールの近くでイメージングしていて、大きなカメラセンサーがある場合は、フィールド回転が発生する可能性があります。良い最初のステップは、一方向のガイドを設定する前に、極の5-10アーク分以内に極を揃えることです。いつでも戻ってフィールドの回転を確認できます。メインカメラでサンプル画像を撮るだけで、画像化に予想される最も高い偏角(おそらく北緯70度)で撮影できます。視野の回転が見られない場合は、極座標をそのままにしておくことができます。極のミスアライメントがいくらかでもあると、12月の補正の方向は空のあるポイントで変化します。 (技術的には、空の2点で方向を逆にしますが、通常、それらの1つは地平線の下にあります。)逆転のための空の位置は、極にどのようにずれているか、つまり方位角と高度の相対量に完全に依存します。アライメントエラー。反転ポイントが地平線に十分近く、通常のイメージング中には遭遇しない状況でさえあるかもしれません。
単一方向ガイドを設定するには、次の手順に従います。
1. 良いガイドスターのいるフィールドに移動し、ガイディングアシスタントを数分間実行します。ガイドグラフを見て、ガイド星が北または南にドリフトしているかどうかを確認します。これが表示されたら、適切な方向に修正を行うためにDecガイドモードをリセットします。たとえば、星が北に流れている場合は、ガイドモードを「南」に設定します。
2. 赤緯に「LowPass2」ガイドアルゴリズムを使用してみて、かなり低い攻撃性係数、たとえば50%から始めます。攻撃性が高すぎる場合は、補正により星がロック位置の「間違った」側に移動する可能性があり、遅いドリフトレートが元に戻るまで星が残ります。このタイプのオーバーシュートを最小限に抑えるには、1つの大きな修正ではなく、いくつかの小さな修正を連続して発行することをお勧めします。
3. ガイディンググラフを見て、修正が正しい方向に行われていること、および星が目標から外れているだけではないことを確認します。数分または数時間のうちに、ドリフトの量が減少していることに気付く場合があります。これは、赤緯の反転点にゆっくりと近づいていることを意味し、それに応じてDecガイドモードを変更する準備をする必要があります。
4. ディザリングを行っている場合は、ディザリングパラメータを「RAのみ」に設定して、12月のガイドを乱さないようにすることができます。
その他のデバイスタブ
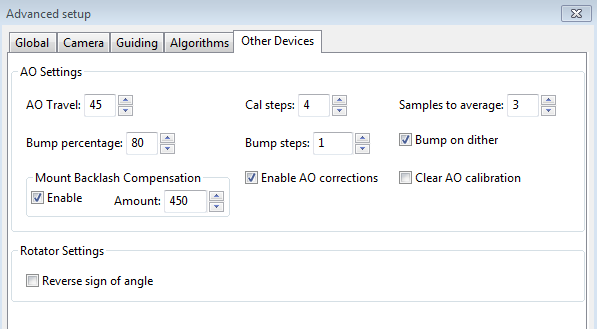
補償光学装置または回転装置のいずれかを使用している場合は、[その他の装置]タブが表示されます。上のセクションは、AOデバイスが使用されている場合のAOデバイスを扱います。これらのパラメーターを使用して、キャリブレーションプロセスと「バンプ」操作が実行される方法を制御できます。 「キャリブレーションステップ」フィールドは、PHD2に、キャリブレーション中にチップ/チルトエレメントをAOステップの単位で、上/下/左/右の各方向に移動する量を指示します。ガイドスターの位置は、キャリブレーションの各レッグの最初と最後で測定され、「samples to average」パラメーターは、これらの各ポイントで取るサンプル数をPHD2に指示します。見ると常にガイド星が少し「跳ね回る」ため、画像の平均化は重要です。他の場所で説明したように、AOユニットはガイドスターの動きの限られた範囲内でのみ補正を行うことができます。これらの制限に実際に達する前にマウント「バンプ」修正を開始する必要があり、「バンプ率」フィールドがその目的で使用されます。マウントを移動するために、完全なバンプ修正は段階的に行われます。「バンプステップ」フィールドは、これらの増分のサイズを制御します。バンプ操作が開始され、ガイドスターが「バンプパーセンテージ」領域外にある場合、PHD2はガイドスターがその範囲内に戻るまでバンプサイズを増やします。その点から中心位置への追加の移動は、指定された「バンプステップサイズ」で続行されます。この複雑さは、マウントがぶつかっていても、細長い星がなく、良好なガイドを維持するために必要です。バンプ操作中、AOは引き続き修正を行うため、長い「マウントバンプ」はAOの調整によって継続的にオフセットされます。 「AOトラベル」フィールドは、AOが各軸で実行できるステップ数を指定します。デフォルト値は、ほとんどのSX AOデバイスで適切に機能しますが、大きすぎる場合もあります。 AOが限界に達するAOキャリブレーション中に問題が発生した場合は、「AOトラベル」の量を下方に調整できます。
「ディザーでバンプ」オプションは、ディザーコマンドが受信されたときにマウントをバンプし、ガイドスターをAOの中心位置に近づけるようにPHD2に指示します。 AOガイドコマンドを有効または無効にするオプションは、[ガイド]タブの[マウントガイドを有効にする]チェックボックスとは独立して動作します。 したがって、チップ/チルトデバイスへのガイドコマンドまたはマウントへの「バンプ」ガイドコマンドを個別に有効/無効にすることができます。 同じ原理が「Clear AOキャリブレーション」オプションにも当てはまります。マウントのキャリブレーションに影響を与えることなく、AOの再キャリブレーションを強制します。 「マウントバックラッシュ補正」コントロールを使用すると、マウントバンプが完了したときにPHD2 Decバックラッシュ補正を適用できます。 これは大規模なディザ操作の高速化に役立ちますが、マウントのDecバックラッシュの量が限られている場合にのみ適切です。 ガイディングアシスタントを使用してDecのバックラッシュを測定し、Decのバックラッシュ補正の使用に関して推奨されることを確認する必要があります。
AOが使用されている場合、[アルゴリズム]タブには、AOデバイス自体のチップ/チルト光学素子を制御するための選択肢のみが表示されます。
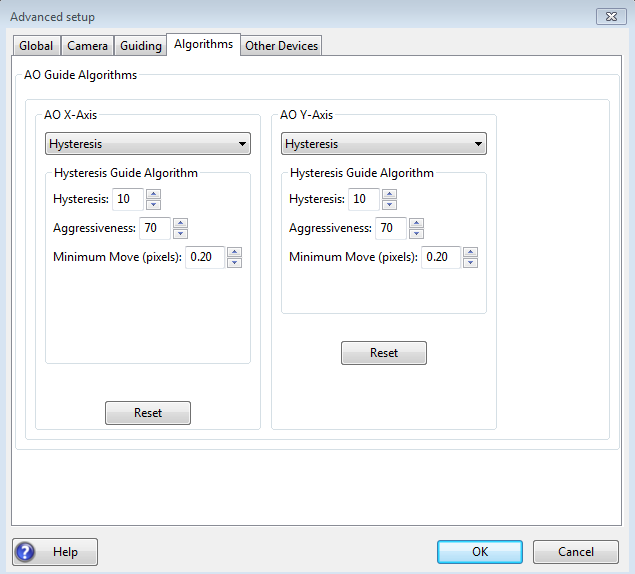
AOは重い機器を動かそうとしないので、ガイドアルゴリズムの選択をより積極的にする余裕があります。 AOのデフォルトのアルゴリズムは「ヒステリシス」です。これにより、ダンピングとアグレッシブネスを簡単に制御できます。別のアルゴリズムを使用する場合は、おそらくそこにも高いレベルの積極性から始める必要があります。 [アルゴリズム]タブに通常表示される他の共有ガイドパラメーターは、デバイスの制御に使用されないため、AOには表示されません。
回転装置にはパラメーターが1つしかないため、デバイスの動作をASCOMの正と負の角度の概念に合わせることができます。 「反転」チェックボックスは、通常、奇数のミラーを備えているため、画像を反転させる光学システムに使用できます。回転の方向と量はキャリブレーションデータの調整に使用されるため、PHD2はASCOM規格に準拠しています。「ローテーターの位置は、0から360度を含まない角度まで、空に対して反時計回りに表されます。」ボックスをチェックする必要があるかどうかを判断する最も早い方法は、実験です。