詳細設定
全体タブ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。また、マウス左クリックで本文にリンクします。
「全体」タブのコントロールは、それぞれのツールチップで十分に説明されていますが、念のためここで要約しておきます。
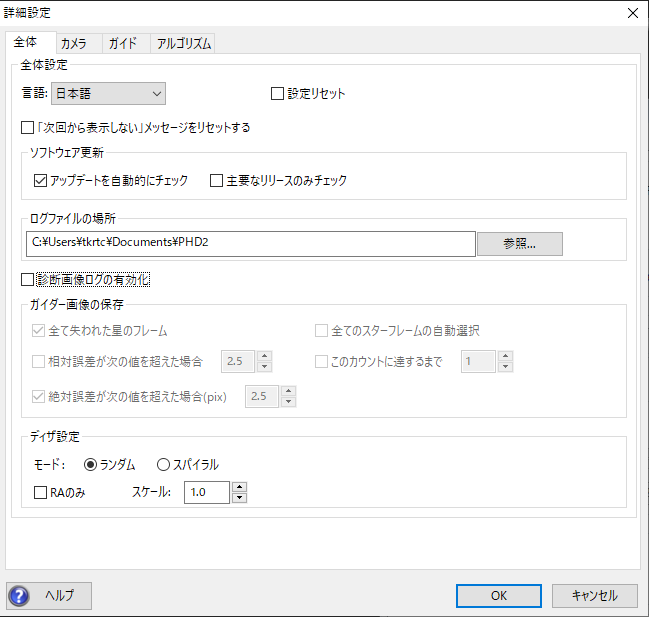
l 「言語」 - PHD2 のユーザーインターフェイスで使用される言語を決定します。 これを変更するには、プログラムの再起動が必要です。
l 「設定リセット」- PHD2を新規にインストールしたときのように、すべての設定を初期値に戻す。
l 「次回から表示しないメッセージをリセットする」 - アラートメッセージを表示しない設定にしている場合は、アラートメッセージの表示を元に戻します。
l 「ソフトウェア更新」
○ 「アップデートを自動的にチェック」 - プログラム起動時にPHD2がソフトウェアのアップデートをチェックするようにします。インターネットに接続されていない場合、チェックは次回PHD2が起動されるまで延期されます。
○ 「主要なリリースのみチェック」 - ソフトウェアのアップデートをチェックする際に、開発版ビルドを含めない。
PHD2のソフトウェア更新について詳しくは、ソフトウェア更新 の項をご覧ください。
l 「ログファイルの場所」 - ガイドログ、デバッグログ、診断画像ファイルが保存されるディレクトリを指定します。Windowsの既定の場所は、ログインしたユーザーに関連付けられた マイドキュメントフォルダです。
l 「ディザ設定」
○ 「ランダム」モード – 赤経のみモードや赤緯ガイドモードが「オフ」に設定されている場合、ディザのサイズと方向を計算するために、ランダム発生器を使用するようにPHD2に指示します。
○ 「スパイラル」モード - 時計回りのらせん状のパターンで固定サイズの量を行うようPHD2に指示します。 これは、撮像カメラに固定パターンノイズが大きい場合や、マウントに厄介な赤緯バックラッシュがある場合などに有効な選択です。
○ 「赤経のみ」 - 赤経軸にのみディザを行うようPHD2に指示します。
○ 「スケール」 - 画像アプリケーションによって指定された最大ディザ量を調整するために使用されるオプションの乗数です。ディザリング を参照
l 「診断画像ログの有効化」- ガイドカメラやPHD2の星認識・測定に関する不具合の診断や製品サポートに使用します。ガイドフレーム画像は、グループボックスのフィルタ/トリガーコントロールに従って、FITsフォーマットで撮影され、ログに記録されます。画像はPHD2ログディレクトリのサブフォルダに保存され、サブフォルダ名の一部として日付と時刻がエンコードされています。たとえば、「PHD2_CameraFrames_2022-03-03-184542」という名前のフォルダは、2022 年 3 月 3 日 18:45:42 現地時間に開始されたログイベントを参照します。個々のガイドフレームは、画像の撮影時刻とそのフレームを保存した理由を示すファイル名で保存されます。 ガイドフレームはFITs形式で保存されるため、ヘッダーには露出時間など他の有用な情報も含まれます。ログ機能は主にトラブルシューティングのために使用されるため、画像のサブフォルダーは30日後に自動的に削除されます。もし、自身の用途に合わせて画像を保存したい場合は、サブフォルダの名前を変更するか、別のディレクトリにコピー/移動してください。ログの誘発となる「イベント」(失われた星や大きなエラーなど)が発生すると、イベントの誘発となった画像を中心に、画像のグループ(画像セット)が保存されます。これにより、異常な状態が発生する前と後のガイド星とガイド枠がどのようなものであったかを示すガイド画像の記録が作成されます。 様々な誘発およびフィルタコントロールについて以下に説明し、コントロールのツールチップにも表示されます。
○ 「全て失われた星のフレーム」 - 失われた星の理由(低SNR、質量変化など)に関係なく、失われた星のイベントの画像セットをログに記録します。
○ 「全てのスターフレームの自動選択」- 星の自動選択に使用されたフレームの画像セットを、結果に関係なく記録します。 星を自動選択する試みが失敗した場合、ユーザーインターフェイスでの選択にかかわらず、常に画像がログに記録されることに注意してください。
○ 「相対誤差が次の値を超えた場合」- 現在のフレームの星のたわみが、隣接するスピン制御で選択された係数で実行平均誤差を超えたときに、設定された画像を記録します。 例えば、平均(RMS)誤差が0.5ピクセルで、現在のフレームの誤差が1.5ピクセルである場合、相対誤差は3です。
○ 「絶対誤差が次の値を超えた場合」 - 星のたわみが隣接するスピン制御で指定されたピクセル数を超えたときに設定された画像をログに記録します。
○ 「このカウントに達するまで」- カウントが隣接するスピン制御の値と一致するまで画像を記録します。 限界に達すると、カウンターはゼロにリセットされます。
画像は業界標準のフォーマットで保存されているので、それを表示したり解析したりできる天文関連のアプリケーションがたくさんあり、その多くが無料で利用できます。 画像撮影や画像処理のアプリケーションのほとんどは、星や視野の光学的品質について詳細な測定を行うことができる他の、より具体的なツールとともに、それを行うことができます。 FITs形式をサポートしているアプリケーションは、ウェブで検索すれば、どのプラットフォームでも見つけることができます。 単に画像を見てピントを確認したり、カメラから返される画像の一般的な品質を確認したりしたい場合は、PHD2を使用することができます。 PHD2がループでもガイドでもないアイドル状態のとき、保存したFITs画像をメイン画面にドラッグ&ドロップしてください。すると画面が更新され、ドロップした画像が表示されます。 PHD2がハードウェアに接続されている必要はありません。 ガンマスライダーの調整、星の選択(手動または自動)、星のプロファイルツールを使って選択した星のHFD(半光束直径)とプロファイルを表示することができます。
カメラタブ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。また、マウス左クリックで本文にリンクします。(除く、ツールチップ表示不可のコントロール)

「カメラ」タブのコントロールは、以下のように使用します。
l 「ノイズ低減」- ノイズの多いガイドカメラ画像(ダークフレームが十分でない画像)の処理に使用するアルゴリズムを指定します。 選択肢は、無し、2x2平均値、3x3中央値。2x2 平均値と3x3 中央値はどちらもノイズをかなり減らすことができる。 3x3中央値は特にホットピクセルを除去するのに有効で、どちらもガイド精度に大きな影響を与えることはありません。 しかし、不良ピクセルマップを作成する方が、暗い星を検出する能力への影響が少なく、より良い解決策となる可能性が高いです。
l 「間欠動作」 - ガイド露出の間に一定の遅延を課します。 これは、ガイド露出が非常に短く、マウントやカメラリンクに非常に高い処理率で負荷をかけたくない場合に有効です。
l 「可変露出遅延」- 高精度エンコーダを搭載したマウントでは、保守的な自動ガイドが有効な場合があります。これは、中程度の長さの露出時間(4秒以上)の使用や、ガイドカメラの露出間の追加遅延を含むことができます。目標は、マウントのエンコーダやポインティングモデルによってまだ処理されていない追跡の変化にのみ反応する、ゆっくりとしたガイドの "流れ" を作成することです。このアプローチの詳細は、こちらをご覧ください。高精度マウントと可変遅延ガイド
可変露出遅延制御は、システムが画像処理/科学操作のための「定常状態」ガイド以外の動作をしているときに、不要な遅延を回避しながらこれらの目標を達成するための方法を提供します。
○ 「可変露出遅延を使用」 - その機能を有効にします
○ 「短時間遅延(秒)」 - PHD2がループ、星選択、キャリブレーション、ディザリング、整定、またはガイドアシスタントを実行しているときの露出遅延を設定します。 マウントによっては、マウントのエンコーダが位置調整を完了するのに十分な時間を与えるために、この値はゼロでない必要があります。
○ 「長時間遅延(秒)」 - PHD2 がガイド中で、上記の状態でない場合の露出遅延を指定します。 この遅延は、最後のガイドコマンドの完了から次のカメラの露出が開始されるまでの時間を定義します。
○ 長い遅延シナリオと短い遅延シナリオの両方において、連続したガイドカメラの露出(およびガイドコマンド)の間隔は、露出時間 + ガイドパルス時間 + 遅延値 になります。
l 「自動露出」- これらは、自動露出時間を制御する設定です。自動撮影または AOガイドに役立ちます。
○ 「最小」 - 最小露光時間です。ガイド星のSNRが目標SNRより高くても露出時間をこの値より小さく設定することはありません。最小露出時間を低く設定しすぎると、シーイング効果を追いかけてしまい、ガイド結果が悪くなる可能性があります。また、AOを使用する場合、急激な微小補正が可能なため、適応光学ユニットのユーザーは、この値を低く設定することができます。 また、視野内に複数のガイド星がある場合は、0.5秒まで下げることも可能です。
○ 「最大」 - 最大露光時間を設定します。ガイド星を選択する前に、PHD2は露出時間を最大値に設定します。選択完了後、希望のSNRに達するまで露出時間を徐々に減少させます。この設定は、マウントの追跡エラーに対応できるよう、十分小さく設定する必要があります。
○ 「ターゲットのS/N比」 - 露出時間を調整して達成しようとする平均的なSNRの値です。SNRは固定された露出時間でもフレームごとに変動することが多いので、ターゲットSNR値を選択する際にはそれを考慮するようにしてください。SNRが3.0以下になると、常にフレームを拒絶します。既定値の6.0は、変動によってSNRが3.0を下回ることを防ぐのに十分な緩和となりますが、2桁の値を推奨します。 「基本的な使い方」で述べたように、SNR は測光で使われる信号対雑音比と似ていますが、同じではありません。
l 「星の飽和検出」- ガイド星候補を特定する際、PHD2は最も正確な位置計算を行うために、飽和した星を避けようとします。 飽和の評価をどのように行うかを指定することで、この作業を支援することができます。
○ 「ADU値最大による飽和状態」 - これは、ガイドカメラセンサーで測定された輝度レベルに依存するため、既定のオプションです。 多くのガイドカメラドライバは、カメラ電子機器が12ビットまたは14ビットモードで自然に動作する場合でも、画像データを8ビットまたは16ビットフォーマットで画像データを返します。 8ビットカメラは255の輝度レベルで飽和し、16ビットカメラは65000以上の輝度レベルで飽和します。 カメラの動作が不明な場合は、星のプロファイルツールを使用して、非常に明るい星の露出を撮影したときの最も明るいピクセルレベルを測定することができます。これにより、カメラが0-255または0-65000の範囲の値を返しているかどうかがすぐにわかり、それに応じて飽和値を設定することができます。
○ 「スタープロファイルによる飽和状態」 - 星のプロファイルの上部が平らであるかどうかに基づく、精度の低い彩度の判断に依存しています。通常の用途にはお勧めできません。
l 「ピクセルサイズ」- ミクロン単位のガイドカメラピクセルサイズ。これはPHD2がガイダーイメージの調整を行い、秒角の単位でガイダー統計情報を報告するために必要です。 ピクセルサイズの正しい値を決定するために、カメラのマニュアルを参照してください。 カメラのピクセルが正方形でない場合は、いずれかの寸法を選択するか、2つの平均値を入力してください。 ピクセルサイズはガイドの精度に影響しないので、このパラメータが少々不正確であっても問題はありません。 このダイアログのビニング設定を使用してカメラのビニングを制御している場合、ピクセルサイズはビニングされていない固有サイズにする必要があります。 注意:カメラとカメラドライバがピクセルサイズをPHD2に報告できる場合、この制御は無効になることがあります(ほとんどの場合可能)。 その場合、無効化されたコントロールに表示される値は、デバイスから報告されたピクセルサイズを表します。 - PHD2ではなく、カメラドライバレベルでビニング係数を指定する場合、結果として報告されるピクセルサイズが変化する可能性があります。 一般的には、PHD2 を使用してビニングを設定する方がよいでしょう(下記参照)。
l 「カメラゲイン」 - この機能をサポートするカメラのゲインレベルを設定します。 このパラメータを下げることで、ノイズレベルを下げることができたり、飽和せずに明るい星を使用できるようになる場合があります。 値の範囲や具体的な効果は個々のカメラに依存するため、このPHD2パラメータはカメラがサポートするゲイン値の最小値と最大値の間の割合として扱われます。 例えば、カメラが40~80の範囲の絶対ゲイン値を使用する場合、PHD2のゲイン値50%は、カメラのゲイン60に変換されます。 ゲインレベルの調整は、設定が安定すれば通常は不要で、調整する場合はダークライブラリや 不良ピクセルマップの交換が必要になります。
l 「応答しないカメラを切断するタイムアウト値(秒)」 - カメラの誤動作は、USB接続の不具合で発生することがあります。 多くの場合、カメラは要求された画像データを返さず、PHD2は "吊るされる" ように見えます。 このパラメータは、予想される露出時間が経過した後、PHD2が応答を待つ時間を決定する。 例えば、タイムアウト値5秒と露出時間2秒を組み合わせると、PHD2に最大7秒の応答待ちを指示する。 この時間内にデータが受信されない場合、PHD2は動作を停止し、カメラの接続を解除してメイン画面に警告メッセージを表示し、その後カメラの再接続を試みます。 ハードウェアや電源の問題が根本的な原因であることがほとんどであるため、この回復の試みは常に成功するわけではありません。 このタイムアウト値には余裕を持たせて、異常な回復動作を回避する必要があります。 また、メインイ画像処理カメラと電子回路を共有するガイドカメラを使用している場合、このタイムアウト値を大きく設定し、メイン画像処理カメラからのフルフレームダウンロードの最大予想時間を大きく上回るようにする必要があります。これは、SBIG 社のデュアルチップカメラの一部のユーザーにとって考慮すべき点です。 PHD2 がこの状況を優雅に処理できるかどうかにかかわらず、根本的な問題はハードウェアまたはカメラドライバにあることはほぼ間違いなく、ガイドを継続する前に解決する必要がある。
l 「ビニング」 - オンチップ(ハードウェア)ビニングをサポートするカメラでは、ガイド露出中に使用されるビニングを指定することができます。 詳細な情報はこちらをご覧ください。ビニングの使用 このコントロールは、カメラがオンチップビニングに対応している場合、およびカメラがPHD2に接続されている場合にのみ表示されます。 ビニングの設定は、下流のガイドパラメータに影響するため、手動で調整するには多すぎるため、異なるビニング設定ごとに別のPHD2プロファイルを常に使用する必要があります。
l 「サブフレーム使用」- この機能をサポートするカメラでは、PHD2は各ガイド露出のサブフレームのみをダウンロードします。このサブフレームは、追跡領域の制限に囲まれた星の周りの領域を示しています。これは、ダウンロード時間が遅いカメラに有効で、ガイドに効果的に使用することができます。 この機能は、キャリブレーションとガイドの両方に適用されます。 星が選択されていない最初のループ中は、フルフレームがダウンロードされますが、星が選択されると、この小さなサブフレームのみがダウンロードされます。 サブフレームを使用しているが、別の星を選択するためにフルフレームを見たい場合は、画像表示画面の任意の場所をシフトしてクリックするか、[ガイド星の自動選択] ボタンをシフトしてクリックするだけです。 サブフレームを使用すると、複数星ガイドのオプションがなくなり、サブフレームオプションで使用できるのは1つの星のみとなります。
l 「カメラ冷却」 - 一部のガイドカメラでは、センサー冷却に対応しています。 これらのコントロールにより、冷却の有無や冷却の設定値を指定することができます。
ただし、カメラがPHD2に接続されていない場合や、カメラドライバがその機能に対応していない場合、このリストにあるコントロールのいくつかは無効になることに注意してください。
ガイドタブ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。また、マウス左クリックで本文にリンクします。(除く、ツールチップ表示不可のコントロール)
ガイドタブには、すべてのガイドアルゴリズムに共通するキャリブレーション、星追跡、ガイド動作に使用されるパラメータが表示されます。
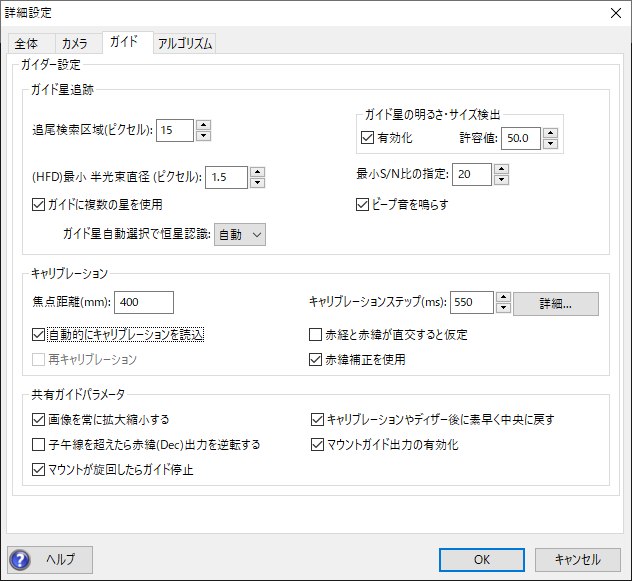
「ガイド星追跡」
l 「追尾検索区域」 - 追尾範囲 の大きさをピクセル単位で指定します。 マウントがうまく動作しない場合、またはより一般的には、天球上の位置合わせがうまくいっていない場合、この値を増やす必要があるかもしれません。 また、ガイドアシスタントの使用中に一時的にこの値を大きくしておくと、ガイド星を失うことなくバックラッシュ測定を行うことができます。 ただ、検索領域を大きくしすぎると、その境界線に複数の星が住み着く可能性が高くなり、ガイドに支障をきたす可能性があることも覚えておいてください。 この値は実際には半径の量であり、15ピクセルの検索領域は30×30ピクセルの正方形に換算されます。
l 「ガイド星の明るさ・サイズ検出」- PHD2 に空の背景と比較したガイド星の明るさと大きさを監視するように指示します。この機能は非推奨であり、ほとんどの設定においてチェックなし(既定値)のままにしておくことができます。
l 「許容値」 - 「有効化」ボックスをチェックすると、測定された明るさとサイズがこのパーセンテージ以上変化した場合、 PHD2 は '失われた星' エラーを発生します。 これは、追跡範囲内に2つの星があり、PHD2が誤って星を切り替えてしまわないようにしたい場合に有効です。 また、薄い雲、高いカメラノイズ、アルファ粒子アーチファクトによるエラーも防ぐことができますが、暗い星をガイドしている場合は信頼できないかもしれません。 もし、画面に星が見えているのに 「星を見失いました - 明るさの変動 」エラーが多発する場合は、この設定の値を大きくするか、完全に無効にしてみてください。
l 「最小半光束直径 (HFD)」 - 適切なガイド星の最小半光束直径 (おおよそ「サイズ」) を指定します。これは、PHD2がホットピクセルの ’かたまり’ を使えるガイド星として誤認識するのを防ぐための最良の方法でしょう。 ホットピクセルではない小さな星をいくつか手動で選び、星のプロファイルツールでそれらの星のHFD値を見ることで、自分のシステムに適した値を決めることができます。 ホットピクセルでなく、正当な暗い星を選択できるように、HFDの最小値を指定することをお勧めします。既定の1.5pxはほとんどの構成で有効ですが、必要に応じて調整できます。例えば、ガイドカメラのピクセルが大きく、見かけ上小さいために多くのガイド星候補が拒否されている場合などです。
l 「最小S/N比の指定」 - 自動選択機能で飽和していない星を受け入れるための最小SNR値を指定します。 この値が大きすぎると、星が選択されないことがあるので、専門家のみが調整する必要があります。 経験的に使えないとわかっている暗い星ではなく、飽和している星を使いたいような場合に使用します。 しかし、このような状況の多くは、ガイドカメラのピントを合わせる、ダークライブラリを更新する、露出時間を少し長くするなどの方法で回避することができます。
l 「ガイドに複数の星を使用」 - PHD2 が複数の星をガイドに使用するかどうかを決定します。詳しくは 複数星ガイド をご覧ください。
l 「ガイド星自動選択で恒星認識」 - PHD2 のガイド星自動選択で形の悪い星が認識されない場合に使用します。 このような場合は、1より大きい値を試して、そのような星を認識する可能性を向上させることができます。 ほとんどのユーザーは、このプロパティをデフォルトの「自動」のままにしておくとよいでしょう。
l 「ビープ音を鳴らす」 - ガイド星を見失ったときに、「ビープ」音を出すかどうかを指定します。
「キャリブレーション」
l 「焦点距離」 - ガイドスコープの焦点距離( mm )。これはPHD2が画像スケールを計算し、秒角単位でガイド性能を報告するために必要な2つのパラメータのうちの1つを提供します。焦点距離の値が間違っていると、既定のガイドパラメータのいくつかが正しく設定されず、性能評価や問題解決に役立てることができなくなります。 新しいプロファイルウィザードを使用して、機器構成の定義の一部として焦点距離を指定する必要があります。
l 「キャリブレーションステップ」 - PHD2がキャリブレーション中に使用するガイドパルスの持続時間を指定します。 その使い方は、ヘルプページ「基本的な使い方」の「キャリブレーション」の項に記載されています。 キャリブレーション中にガイド星の動きが速すぎるか遅すぎるかによって、値を調整することができます。一般的な目安として、天の赤道(赤緯=0)から約20度以内、東西の地平線の上空で、各方向に8~14ステップとなるように調整するのがよいでしょう。このコントロールの右側にある 「詳細...」 ボタンを押すと、適切な値を計算するための「キャリブレーション計算」ダイアログが表示されます(下図参照)。 他のパラメータと同様に、この値は新しいプロファイルウィザードを実行する際に計算されるため、通常は調整する必要はありません。
l 「自動的にキャリブレーションを読込」 - 機器が接続されると同時に、PHD2が自動的に最新のキャリブレーションデータを読み込みするように指示します。 ASCOM(またはIndi)マウント接続を使用している場合、または「Auxマウント」接続を使用している場合は、おそらくこのオプションを設定することをお勧めします。逆に、PHD2がスコープポインティング情報を利用できない場合、このオプションはリセットしておく必要があります。新しいプロファイルウィザード作成では、このオプションをどのように設定するかを尋ねます。なお、自動復元は個別の機器プロファイルごとに記憶され、プロファイルを読み込んで機器に接続したときにのみ効果を発揮します。ガイド作業を開始する前に強制的に再キャリブレーションを行うには、PHD2/ガイドの「ガイド」ボタンをShift-クリックするのが最も簡単です。自動復元オプションを設定した場合は、ガイドカメラがガイドスコープまたは空に対して回転していないことを確認する必要があります。
l 「赤経と赤緯が直交すると仮定」 - 通常、キャリブレーション処理では、赤経と赤緯のカメラ角度を個別に計算します。 これらの値に大きな精度を求める必要はなく、通常は既定の動作でうまくいきます。 しかし、マウントの周期誤差が非常に大きい場合、赤緯バックラッシュが非常に大きい場合、またはシーイングが非常に悪い場合、赤経と赤緯の角度を強制的に垂直にすることができます。 このオプションを選択すると、PHD2は赤経のカメラアングルを計算し、それに直交する赤緯を断定します。
l 「再キャリブレーション」 - ガイドを再開する前に、現在マウントに使用されているキャリブレーションデータをクリアし、ガイドを再開する前に再キャリブレーションするように PHD2 に指示します。 ガイドカメラを回転させたり、ガイド結果が通常より大幅に悪くなった場合など、さまざまな理由でこれを行うことができます。 メインページのPHD2ガイドアイコンをShift-クリックすると、同じ結果が得られ、再キャリブレーションが強制的に実行されます。
l 「赤緯補正を使用」 - PHD2がASCOM/Indi接続 (マウントまたは Aux)を介してマウントからポインティング情報を取得できる場合、現在の赤緯に基づいて赤経ガイドレートを自動調整します。 このボックスは、マウントコントローラが調整を行う非常に珍しいケースを除いて、チェックしたままにしてください。このオプションは「赤緯バックラッシュ補正」とは全く別の機能ですので、混同しないようにしてださい。
「共有ガイドパラメータ」
l 「キャリブレーションやディザー後に素早く中央に戻す」 - キャリブレーションまたはディザリング中に、マウントは最初の「ロック」位置からかなりの距離を移動することがあります。 このチェックボックスをクリックすると、PHD2は、ガイドアルゴリズムの「最大許容ガイドパルス時間」設定と追跡領域のサイズによって許可された最大のガイドコマンドを使用して、マウントをできるだけ早くロック位置に戻します。 これはキャリブレーション作業を高速化するための方法であり、このチェックボックスの使用は完全に任意です。 もし高速再センタリング中に星を見失い、キャリブレーションがしばしば失敗するようであれば、このオプションを無効にする必要があります。 そのような問題は、極のアライメント誤差が大きいか、赤経の周期誤差が大きすぎることを示唆している可能性があります。ガイドアシスタントを実行することで、問題の原因を確認することができます。
l 「子午線を超えたら赤緯出力を逆転する」 - 子午線反転後のキャリブレーションデータの調整方法をPHD2 に指示します。 いくつかの新しいマウントは、その「架台の側面」状態を追跡し、子午線反転後に赤緯モーターの方向を自動的に反転させます。 古いマウントはこのようなことはしません。 どちらの場合でも、PHD2はマウントが架台の側面状態に基づいて自動的に動作を変更するかどうかを知る必要があります。そのため、PHD2には、正しい設定を自動的に決定する 子午線反転キャリブレーションツール が用意されています。また、この簡単な実験により、手動で設定を把握することも簡単です。
○ チェックボックスを無効にした状態で、架台の片側でキャリブレーションを行い、マウントを反対側に移動させます。
○ ASCOMやIndi経由でガイドしている場合、または「AUXマウント」接続を使用している場合は、そのままガイドを開始します。
○ ST-4経由のガイドのみで、PHD2にスコープのポインティング情報がない場合は、まず「ツール」メニューから「子午線反転の調整」を選択し、ガイドを開始します。
○ いずれの場合も、ガイドが正常に動作する場合は、チェックボックスをオフにしたままにしてください。
○ もし、赤緯の乱れを確認したら、チェックボックスにチェックを入れ、キャリブレーションを含むすべての手順を繰り返してください。 ボックスにチェックを入れるだけでは何も解決しないので、必ず手順を繰り返してください。
注意:この手順は、正しい設定を決定するまでは、すべて従う必要があります。この設定を変更すると、次回キャリブレーション時に何が起こるかが決定されるだけです。
l 「マウントガイド出力の有効化」 - これは、PHD2 がマウントにガイドコマンドを送信するように指示するため、通常はチェックされています。マウントの未補正の挙動を観察したい場合など、この設定を無効にしたい場合もあります。 ほとんどの場合、この設定を自動的に処理するガイドアシスタントを実行した方がよいでしょう。
l 「マウントが旋回したらガイド停止」 - マウントが旋回されているときに、PHD2がガイドを続行しようとするのを防ぎます。 通常はチェックしたままにしておく必要があります。注意:このオプションは、ASCOMまたはINDIマウントの接続がある場合にのみ表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)

キャリブレーションパラメータを確認または変更するには、一番上の4 つの編集コントロールが正しく入力されていることを確認します。 新しいプロファイルウィザードで焦点距離とカメラピクセルサイズを既に指定している場合、これらのフィールドはこのフォームに既に入力されています。 マウントに ASCOM 接続を使用している場合、ドライバが正しく報告していない場合を除き、「ガイドスピード」と「キャリブレーション赤緯」のフィールドは通常正しい値を表示します。 そうでない場合は、自分で用意する必要があります。 ガイドスピードは恒星速度の倍数で指定します。ほとんどのマウントは恒星速度の1倍や0.5倍を使用しますが、他の値を選択することも可能です。 注意:ここでガイドスピードの設定を変更しても、マウントのガイドスピードの設定は変更されません - それはマウントドライバまたはハンドコントローラを介してのみ行うことができます。 このフィールドがすでに入力されている場合、変更しても効果はありません。 「キャリブレーションステップ」フィールドは、良好なキャリブレーションが得られると思われる既定値12 のままにしておくことができます。 かなり小さい値を使用すると、シーイングエラーや小さなマウントエラーによってキャリブレーションエラーが発生する可能性が高くなります。 この値を12より大きくすると、大きいことが必ずしも良いとは限らないので、注意が必要です。この値が大きいと、赤経の周期誤差が補正されなかったり、赤緯のドリフトが大きくなったりして、キャリブレーションの精度が悪くなります。これらのフィールドの値を変更すると、PHD2はキャリブレーションのステップサイズの値を再計算します。その後「OK」をクリックすると、その値が 「ガイド」タブダイアログのキャリブレーションステップサイズフィールドに挿入され、次のキャリブレーションに使用されます。「OK」をクリックすると、「ガイド」タブと 「カメラ」タブの焦点距離とカメラピクセルサイズのフィールドにも入力されるので、計算で行った変更もそちらに反映されます。キャリブレーション計算を使って実験したり、他の人のシステムの設定を確認したりするだけの場合は、この操作を行わないでください。「キャンセル」ボタンをクリックすると、現在のプロファイルの値を一切変更せずに計算を終了します。 繰り返しになりますが、PHD2は 「ガイドスピード」フィールドに何を入力しても、マウントのガイドスピード設定を変更することはありません。
新しいプロファイルウィザードを使用して機器プロファイルを構築した場合、「詳細...」ボタンと「キャリブレーション計算」ダイアログを使用する理由はほとんどありません。
アルゴリズムタブ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。また、一部はマウス左クリックで本文にリンクします。

アルゴリズムタブでは、必要なガイドアルゴリズムを選択し、それらに関連するパラメータを微調整することができます。 アルゴリズムの選択を変更すると、表示されるパラメータが大きく変化します。 そのため、ガイドアルゴリズム に関連するパラメータはすべてまとめて、別の項目で扱います。
残りの制御、すなわちガイドアルゴリズムの選択に依存しない制御を以下に説明します。
l 「赤経(RA)最大許容ガイドパルス時間」 - 赤経のガイドパルスの最大許容時間を指定します。 偶発的な事象(突風、ホットピクセルなど)による大きな偏向を避けたい場合は、これを既定値より小さくするとよいでしょう。 しかし、ホットピクセル(HFD最小星)に対して保護されていれば、これを変更する理由はほとんどないでしょう。
l 「バックラッシュ補正 – 有効化」 - 赤緯の方向を反転させる必要があるときに、PHD2が補正係数を適用するかどうかを制御します。下記項目を参照ください。
l 「赤緯(Dec) 最大許容ガイドパルス時間」 - 赤緯の最大許容ガイドパルス時間を指定します (上記と同じですが、赤緯の場合)。
l 「赤緯ガイドモード」 - 赤緯ガイドをさらに制御することができます。 赤緯ガイドは赤経ガイドとは異なり、トラッキングエラーはマウントのドライブシステムの不完全性によって引き起こされるものではありません。 その代わり、赤緯のトラッキングエラーは、ポーラーアライメントエラー、機械のたわみ、風、ケーブルの束縛や引きずり、ガイド機器の不要な動きによって引き起こされます。 このような機械的な問題がなければ、赤緯のトラッキングはスムーズで、以前の補正によるオーバーシュートがないと仮定すれば、ほぼ単一方向であるはずです。既定の「自動」は、PHD2に、様々なガイドアルゴリズムの動作に応じて、多少の方向転換を許容するように指示します。 しかし、マウントの赤緯バックラッシュが激しい場合、方向転換を完全に防止したい場合があります。そこで、「北」または「南」のどちらかを選択し、その方向だけに補正を制限することができます(単一方向赤緯ガイド)。 ただし、これらのモードでオーバーシュートして補正すると、星の位置が長時間ずれたままになる可能性があることに注意してください。また、シーイングによる偏向よりもドリフト率を大きく保つために、意図的にポーラーアライメントを悪化させるのもよいでしょう。 最後に、ここで「off」を選択すると、赤緯ガイドが完全に無効になり、赤緯ガイドをサポートしないシンプルなトラッキングマウントに適した選択となります。
l 「リセット」 - 選択された赤経または赤緯のアルゴリズムのガイドパラメータを既定値にリセットします。 最小移動量の設定は、新しいプロファイルウィザードで採用されているのと同じアルゴリズムで設定されます。 以前にガイドアシスタントを使用して最小移動量の設定を調整したことがある場合は、その手順を繰り返す必要があります。
最も一般的に使用されるマウントには、赤緯に多少のバックラッシュがあります。赤緯バックラッシュ で簡単に解説しています。 バックラッシュは、赤緯ガイドコマンドの方向が変わるたびに遅延が発生します。 この間、赤緯ギアは完全に噛み合っておらず、軸はガイドコマンドに応答して動きません。 多くのマウントにはバックラッシュ補正の設定がありますが、これらはガイドに使用するべきではありません(通常、視覚的な使用のみを目的としています)。 実際に必要な補正量は、ポインティング位置とシステムの機械的負荷に依存するため、固定値を設定すると、通常、安定しない振動が発生します。 位置依存性の理由としては、ギアの偏摩耗やスコープの赤緯の著しいアンバランスなどが挙げられます。 PHD2が実装するバックラッシュ補正は適応型であり、測定結果に応じて補正量が上下に調整されることを意味します。 この機能を有効にする前に、ガイドアシスタントを実行し、赤緯バックラッシュ(赤緯で完全に方向転換するのに必要な時間遅れ)を測定する必要があります。 マウントのガイド速度設定が高いほど(例:恒星0.9倍)、この遅延は小さくなることに留意してください。 測定値が3秒以下であれば、ガイドアシスタントはバックラッシュ補正を行うことを推奨します。 その推奨を適用すると、バックラッシュ補正の設定は自動的に処理されます。 バックラッシュ補正のUIコントロールには、「最小」「最大」の補正量の設定があります。 これらは、補正開始値に対して行われる調整の範囲を効果的に制限するものです。 マウントの動作に慣れている場合は、これらの設定を手動で調整して、補正がうまくいく範囲に収まるようにすることができます。 それ以外の場合は、既定値のままにしておいてください。 バックラッシュ補正アルゴリズムは、バックラッシュが数秒以下で、マウントに他の重大な機械的問題がない場合、一般的にうまく機能します。 ガイド開始時には、赤緯ギアシステムの初期状態が不明なため、短い期間不安定になることが予想されますが、実際に撮影を開始する前に安定させるようにしてください。 もし、赤緯の振動が繰り返されたり、軸が落ち着かない場合は、補正機能を無効にし、デバッグログファイルをPHD2サポートフォーラムに提出してください。
その他デバイスタブ
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)

適応光学AO機器またはローテータ機器のいずれかを使用している場合、「その他デバイス」タブが表示されます。AOを使ったガイドの一般的な説明は、こちらでご覧いただけます 適応光学AO装置 上段は、AO装置を使用している場合の処理です。これらのパラメータを使用して、キャリブレーション処理と「bump」操作の方法を制御することができます。「キャリブレーションステップ」フィールドは、キャリブレーション時にチップ/チルト要素を上下左右の各方向に移動させる量をAOステップの単位でPHD2に指示します。ガイド星の位置は、キャリブレーションの各区間の開始時と終了時に測定され、「平均するサンプル数」 パラメータは、これらの各位置で取得するサンプル数を PHD2 に指示します。シーイングによってガイド星は常に「跳ね回る」ので、画像を平均化することは重要です。別項で述べたように、AOユニットはガイド星の限られた移動範囲でのみ補正を行うことができます。これらの制限に実際に到達する前に、マウントの「Bump」補正を開始したいと思うでしょう。「Bump率」フィールドは、そのために使用されます。マウントを移動させるには、フルBump補正を段階的に行います。「Bumpステップ」フィールドは、これらの増分の大きさを制御します。Bump動作を開始しても、ガイド星が「Bump率」の範囲外にある場合、PHD2はガイド星がその範囲内に戻るまでBumpサイズを大きくします。その地点から中心位置まで、指定された「Bumpステップサイズ」で追加移動が行われます。 この複雑な動作は、マウントをbumpさせても星が伸びないような良好なガイドを維持するために必要です。 Bump動作中もAOは補正を続けているため、長い「マウントBump」はAOの調整によって常に相殺されます。「AOの移動」 フィールドは、AO が各軸で行うことのできるステップ数を指定します。 既定値は、ほとんどの SX AO装置でうまく機能しますが、場合によっては大きすぎることがあります。 AO キャリブレーション中に AO が限界に達する問題が発生した場合、「AOの移動」量を下方に調整することができます。
「ディザリングBunp」オプションは、ディザリングコマンドを受信したときにマウントをBunpさせ、ガイド星をAOの中心位置に近づけるようPHD2に指示します。AOガイドコマンドを有効または無効にするオプションは、ガイドタブの 「マウントガイド出力の有効化」 チェックボックスとは独立して動作します。そのため、チップ/チルトデバイスへのガイドコマンドとマウントへの「Bump」ガイドコマンドのどちらかを独立して有効/無効にすることができます。同じ原理が 「AOキャリブレーションのクリア」オプションにも当てはまり、マウントのキャリブレーションに影響を与えることなく、AOの再キャリブレーションを強制的に行います。「マウントバックラッシュ補正」 コントロールは、マウントBunpを行う際にPHD2 赤緯のバックラッシュ補正を適用させることができます。これは、大きなディザ操作を高速化するのに役立ちますが、マウントの赤緯バックラッシュの量が限られている場合にのみ適切です。ガイドアシスタントを使用して赤緯バックラッシュを測定し、赤緯バックラッシュ補正の使用に関して推奨される方法を確認する必要があります。バックラッシュ補正値は、AO使用時には自動調整できないので、ガイドアシスタントの提案する値の1/2程度を指定するのがよいでしょう。
AOが使用されている場合、「アルゴリズム」タブには、AOデバイス自体のチップ/チルト光学素子を制御するための選択肢のみが表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。
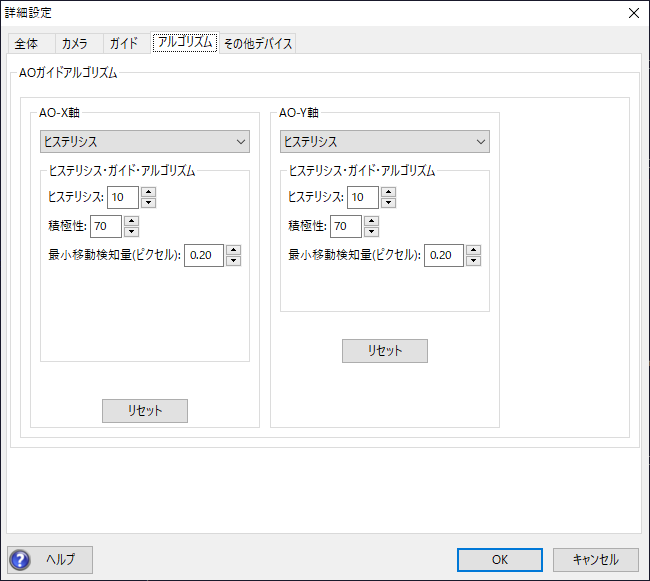
AO は重い機器を移動しようとしていないため、ガイドアルゴリズムの選択をより積極的に行う余裕があります。 AOの既定のアルゴリズムは「ヒステリシス」です。これにより、ダンピングと積極性を簡単に制御できます。 別のアルゴリズムを使用する場合は、おそらくそこでも高いレベルの積極性から始める必要があります。 通常「アルゴリズム」タブに表示されるその他の共有ガイドパラメータは、デバイスの制御に使用されないため、AO には表示されません。
「ローテータ」 機器には、機器の動作を ASCOM の正と負の角度の概念に一致させるためのパラメータが 1つしかありません。 「反転」チェックボックスは、通常、ミラーの数が奇数であるため、画像を反転する光学システムに使用できます。 回転の方向と量は、キャリブレーションデータの調整に使用されるため、PHD2はASCOM標準に従います。「回転子の位置は、空に対して反時計回りに、0 から 360 度までの角度として表されますが、360度を含まない」 ボックスをチェックする必要があるかどうかを判断するには、実験が最も手っ取り早い方法である可能性があります。