ツールメニュー
ポーラアライメントツール
PHD2 は、3つの異なるポーラアライメントツールがあります。 これら3つは基本的な目的は同じで、マウントの赤経を物理的に天の北極にアライメントすることをサポートします。これらのポーラアライメントツールは、多くの一般的なゴーツーマウントの一部である「2つ星」または「3つ星」のアライメント手順とは異なります。 マウントソフトウェアは、一般に、極軸合わせエラーを含むマウントのさまざまなエラーを補正するために旋回/ポインティング操作を調整することにより、ゴーツー操作を最適化することに重点を置いています。 それらは通常、マウントの方位角と高度制御の物理的な調整を必要としません。これは、イメージングとガイドを成功させるために必要なものです。
以下の表にまとめられているように、3つのポーラアライメントツールにはそれぞれ異なる要件と動作があります。 精度と速度の列には、1 ~ 3 の範囲の値が表示されます。1 が最低で、3 が最高です。
|
方法 |
精度 |
速度 |
天空の眺め |
その他 |
|
従来型ドリフトアライメント |
3 |
1 |
東または西の地平線 子午線/天の赤道 |
ほとんどの旋回 軸を別々に測定/調整 |
|
静的ポーラアライメント |
1 |
3 |
極域 |
極域の星の識別が必要 最小限の旋回 |
|
ポーラドリフトアライメント |
2 |
2 |
極域 |
最小限の旋回 |
ポーラアライメントの原型であるドリフトアライメントは、今でも精度の高い " 金字塔 " として多くの人に知られています。その理由のひとつは、天球上の赤経軸のズレによって生じるドリフト量を直接測定することができるからです。 ドリフトアライメントツールでは、一度に1つの可視恒星しか使用しないので、星の特定は不要です。しかし、マウントの各軸を個別に調整する必要があり、望遠鏡をかなり広い範囲で旋回させる必要があるため、特に初心者の方には時間がかかる手順となることがあります。また、天の赤道と子午線が交わる部分と、東または西の地平線(方位角90度または270度)から30度上付近がよく見えると効果的です。毎晩セットアップを急いでいる方や、空の視界が限られている方にとって、これらの要件は魅力的ではないかもしれません。
第2のアライメントオプションである静的ポーラアライメントは、異なる方法を取ることでこれらの懸念に対処します。具体的には、処理速度を最適化するために、精度をある程度犠牲にします。 北極または南極の明確な視界があればよく、マウントの両軸を同時に調整できます。 そのため、より直感的で、短時間で完了する可能性が高いです。 北極付近のいくつかの星を視認し、識別する必要がありますが、星を見るのに十分な空の状態であれば、このツールはそれを合理的に簡単にしてくれます。
3つ目のアライメントオプションであるポーラドリフトアライメントは、精度とスピードを少し犠牲にするものの、おそらく最も簡単に実行できる方法です。北極または南極の明確な視界が必要で、マウントの両軸を同時に調整することが容易です。ユーザーによる入力はほとんど必要ないので、使い方はとても簡単です。
3 つの手法については、以降の章で詳しく説明します。 撮影者は、おそらくそれらを試して、ニーズに最も適したものを選択する必要があります。 アライメント精度の重要性は強調されすぎることが多いため、ユーザーは物事を前向きにとらえる必要があります。 ほとんどの赤緯ドリフトは、マウントが適切に動作し、赤緯のバックラッシュがあまりないと仮定すると、PHD2ガイドによって適切に管理できます。 ただし、ある時点で、ポーラアライメントエラーの量によって、画像にフィールド回転が発生する可能性があり、これは修正できません。 撮像センサーが大きくなり、目標が極に近づくほど、磁場の回転が問題になる可能性があります。 次のようなオンライン計算機を使用して、予想されるフィールドの回転を計算できます。
http://celestialwonders.com/tools/rotationMaxErrorCalc.html
計算機は、状況に応じてどの程度の精度が十分であるかを判断するのに役立ちます。 また、マウントの調整メカニズムの精度と、空のさまざまな部分に移動するときに物が動かないように十分に締め付ける能力によって、手順が制限される可能性があることを覚えておくことも重要です。
星の自動選択
ガイド星の自動選択は、いくつかの方法で行うことができます。 最も簡単な方法は、メイン画面の「ガイド」アイコンの隣にある「星の自動選択」アイコンをクリックすることです。 また、キーボードショートカットの <Alt>S を使用するか、「ツール」メニューの「ガイド星の自動選択」項目をクリックすることでも、自動選択を開始することができます。これらの操作を行うと、PHD2 は現在のガイド画像をスキャンして、ガイドに最適な星を特定します。 PHD2は、十分な明るさを持ち、飽和しておらず、十分な大きさを持ち、他の星に近すぎず、フレームの端に近すぎない星を選択するように努めます。選択された星は画面上ではかなり暗く表示されますが、それは重要なことではありません。見る必要があると感じたら、メイン画面のガンマスライダーを調整すればよいのです。 自動選択機能は、ほとんど常に画面を見るよりも良い仕事をしますし、複数星のガイドを呼び出す唯一の方法です。 多くの場合、対話的に選んだ星は飽和状態かそれに近い状態であり、標準以下の結果になります。星のプロファイル ツールを使って、どのように選択されたとしても、主星(最も明るい星)の特性を調べることができます。自動選択で最良の結果を得るには、不良ピクセルマップまたはダークライブラリのいずれかを使用し、PHD2が誤ってホットピクセルを選択する可能性を減らすために 最小半光束直径 (HFD)値(詳細設定/ガイドタブ)を指定する必要があります。また、カメラの最大ADU 値で、ADU値最大による飽和状態 (詳細設定/カメラタブ) で彩度を測定するオプションを設定すると、より適切に機能します。例えば、16ビットガイドカメラの場合、最大ADU値は65000に近づき、8ビットカメラの場合、255付近で飽和します。 カメラの内部電子回路(12ビットまたは14ビットADCなど)に関係なく、カメラドライバは常に8ビットまたは16ビット量としてカメラ画像を配信します。
星の選択を解除して露出のループを続けるには、「星の自動選択」アイコンをShift+クリックするか、画像表示画面の任意の場所でShift+クリックするだけです。 これは、サブフレームを使用していて、ガイダー画像のフルフレーム表示に戻りたい場合に便利です。
キャリブレーションアシスタント
キャリブレーションアシスタント(CA)は、正確なキャリブレーションを完了するための最良の手段を提供します。 キャリブレーションアシスタントは、キャリブレーション処理を妨げる可能性のある操作上の問題を回避することで、これを実現します。特に初心者の方は、操作とマウントの両方に問題があり、何がいけなかったのか理解できないことが多いので、この点は重要です。また、CAは手順の詳細を考えることなく、できるだけ早くキャリブレーションを完了させたい経験豊富な画像処理者にも有効です。(1)望遠鏡を最適な天空位置に旋回させ、バックラッシュを事前に除去する、(2)キャリブレーションを開始し、完了を待つ、(3)結果を評価し、全体の品質評価を行う、キャリブレーションアシスタントセッションの3つの基本段階があります。品質が良好でないと判断された場合は、どのような問題が発生したのか、具体的に説明が提供されます。CAを使用するためには、PHD2に位置情報を提供できる「マウント」または「Auxマウント」接続を使用する必要があります。通常はASCOMまたはINDIドライバですが、非常に基本的なマウントの場合は「Ask for coordinates (座標を尋ねる)」ツールも使用できます。これらの接続のいずれかを介してマウントを旋回させることができない場合でも、CAを望遠鏡の向け方のガイドとして使用し、キャリブレーションを開始させ、結果を評価することができます。
CAは対話モードでのみ使用でき、ガイドが別の画像処理アプリケーションによって制御されている場合には機能しません。CAは、「ツール」メニューの「キャリブレーションアシスタント...」という項目を使用して明示的に起動することができます。CAは、カメラの露出を開始/停止したり、ガイド星の自動検索を行ったりする必要なステップを処理するので、いつでも開始することができます。 ガイドアイコンを<Shift>マウス左クリックすることで強制キャリブレーションを開始した場合、スコープが空の適切な領域を指していない場合、新しいダイアログが以下のように表示されることがあります。
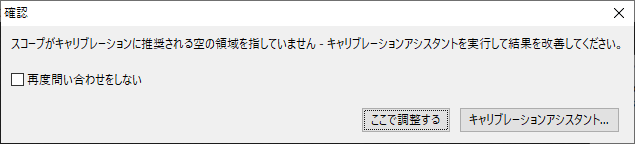
このダイアログには、キャリブレーションアシスタントを開始するボタンが表示されており、通常はこのオプションを選択する必要があります。 代わりに「ここで調整する」をクリックすると、CA は実行されず、これまでと同様に調整が続行されます。 CA がアクティブになると、次のようなダイアログ画面が表示されます。(下の例は、キャリブレーション完了後の画面)
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)

画面上部の説明文は、現在スコープが向いている場所によって変化します。
旋回操作
CAは常に、赤緯=0(天の赤道)付近で、中央子午線から東または西に5度の位置にスコープを旋回する事を提案します。東または西の選択は、子午線反転の引き金とならないようにするために、マウントが現在向いている場所に基づいています。フォークマウントのユーザーは子午線反転の影響を受けず、ユーザーインターフェースの反転関連メッセージは無視することができます。あなたがほとんどのユーザーと同じであれば、推奨されるキャリブレーション場所が最良の選択であり、「旋回」ボタンをクリックしてスコープをその場所に移動するだけです。もちろん、スコープが安全に旋回を行えることを確認する必要があります。あなたの場所で空が遮られている場合、コントロールの「キャリブレーション位置」グループの値を変更することで、キャリブレーションの位置を調整することができます。このようなことをすると、CAを使う意味がなくなってしまうので、控えめにする必要があります。定期的に同じ視界制限を受ける場合は、「カスタム値を保存」ボタンで修正内容を保存し、「カスタム値の読み込む」ボタンで他の夜にその値を再利用することができます。「旋回」ボタンをクリックすると、スコープを2回連続で回転させます。1回目はキャリブレーション位置のやや南側に大まかに配置し、2回目はバックラッシュを解消するために1度だけ北側に移動させます。この処理だけで、キャリブレーションに関する最も一般的な問題の原因を解消することができます。旋回が完了しても、既存のキャリブレーションは有効で、「調整」ボタンをクリックするまでクリアされることはありません。つまり、CAは、ガイドアシスタントの診断やマウントの性能測定に最適な場所にスコープを旋回させるための便利な手段としても利用できます。CAダイアログは「キャンセル」ボタンをクリックするまで開いたままなので、その機能を繰り返し使用することができます。
キャリブレーション
「調整」ボタンをクリックすると、まずマウントガイドの速度やキャリブレーションのステップサイズの値などの設定をCAが健全性チェックします。これらの値が正しくないと、特定の問題を警告する別のダイアログが表示されます。キャリブレーションのステップサイズが間違っている場合、CAが「再計算」することを提案します。マウントガイドの速度が低すぎる場合は、少なくとも恒星の0.5倍まで上げるようアドバイスされます。これはPHD2ではできません。マウントドライバまたはマウントハンドコントローラで調整する必要があります。CAの健全性チェックのダイアログは次のようになっています。
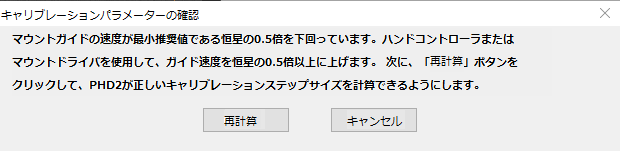
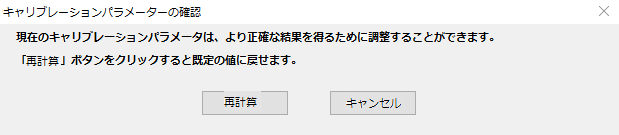
他のCAメッセージと同様に、推奨事項に従うことが強く推奨されます。
この健全性チェックが完了した後、CAは通常のキャリブレーション手順を開始します。キャリブレーションの進行状況を見たい場合は、CA画面を邪魔にならない位置に移動することができます。キャリブレーションが完了すると、CAは様々な指標を用いて結果を判断し、「悪い」「許容範囲」「良い」の総合評価を表示します。視界の悪い場所やマウントの機械的な問題など、状況によっては「良い」結果を得ることができない場合もあります。「許容できる」結果とは、あくまでもガイドを続けるのに十分な結果であり、こだわるべきことではありませんが、後にガイドの結果を向上させたい場合には念頭に置くべきことです。「悪い」結果は、ほとんどの場合、まだ使用できますが、ガイドの結果が非常に良いことはないと思った方が良いでしょう。もし、キャリブレーションが完全に失敗した場合(動きが小さすぎる、星が見えなくなったなど)、問題を解決してキャリブレーションをやり直す必要があります。
キャリブレーションの結果が「良好」でない場合、「説明」ボタンをクリックすると、どのような問題があったのか、より良い結果を得るためにどのようなことができるのかについての説明を見ることができます。CAの指示にすべて従った場合、その説明は、「直交性エラー」、「予期せぬレート」などの問題や、キャリブレーション警告の引き金になる状況について、よりよく理解するのに役立つと思われます。
「キャンセル」ボタンをクリックすると、CA画面が閉じるだけで、PHD2メイン画面で行われている操作をキャンセルしたり停止したりすることはありません。
ガイドアシスタント
ガイドアシスタント(GA)は、現在のシーイング状況やマウントとガイドサブシステムの一般的な動作を測定するのに役立つツールです。これを実行すると、ガイド出力が一時的に無効になり、それに伴うガイド星の動きを測定します。これにより、シーイング(大気)の状態によって生じる高周波の運動を確認することができます。 これは、測定できないほど高い周波数で発生するため、通常のガイドでは修正できません。従来のガイドでこれらを修正しようとすることは、しばしば “シーイングを追いかける”と呼ばれ、通常、悪い結果につながります。 これを避けるには、PHD2がこの高周波の動作のほとんどを無視するようになる最小移動量を設定するのが最も効果的です。GA は、赤経と赤緯の全体的なドリフト率や、赤経のピーク・ツー・ピークと最大変化率の測定値など、システムの他の動作も表示できます。これらは通常、導き出すことができますが、マウントの根本的な性能を向上させたい場合、例えば、赤経の誤差補正を定期的に行うなど、マウントの根本的な性能を向上させたい場合には、これらの測定が役立ちます。 GAでは、ユーザーインターフェースでそのオプションを選択すると、システムの赤緯バックラッシュを測定することもできます。 これらの用語に馴染みがない方は、こちらで簡単な解説をご覧ください。マウントの一般的な問題
ガイドアシスタントを起動すると、すでにガイドをしているかどうかで動作が変わります。 ガイド中であれば、初期画面は次のようになります(もちろん、データの値は異なります)。
フォームの一番上のフィールドには、常にGAが何をしているか、どんなアクションを取るべきかが表示されるので、何が起こっているのかわからないときは、まずそこを見るべきです。 この場合、測定プロセスが自動的に開始されたので、少なくとも2分間はそのままにしておく必要があります。 ボタンのすぐ上にあるテキストフィールドにも、何が起こっているのかがまとめられています。 一番下の3つのボタンは、GAの動作状態に基づいて有効または無効になります。 この場合、すでに測定が開始されているため、「スタート」 は無効になっています。
ガイドが非アクティブなときに GA を起動すると、初期フォームは異なって見えます。
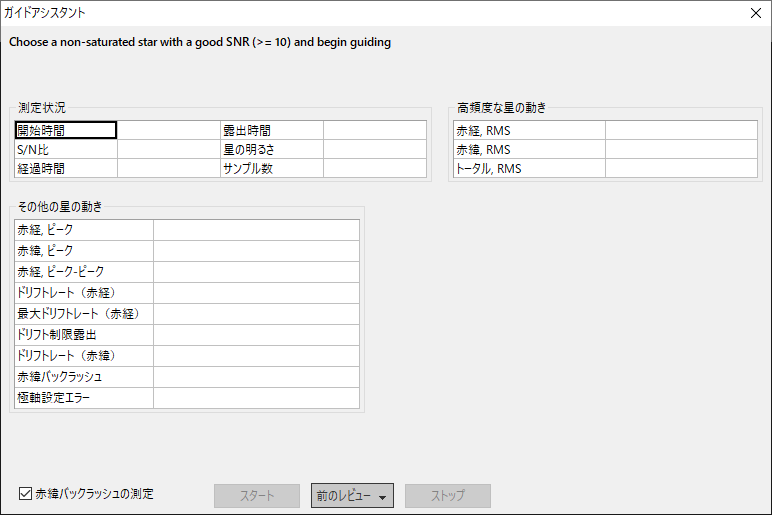
この場合、まずPHD2でガイドを開始する必要があります。ループを開始し、星を自動選択し、ガイドします。 それが終わると、GAの 「スタート」 ボタンが有効になり、測定を開始することができます。
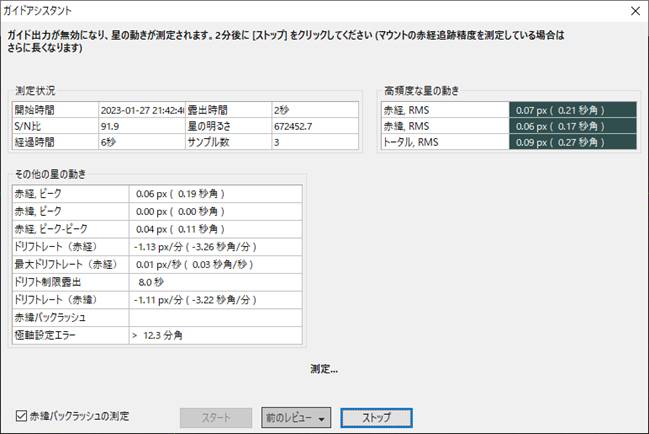
GA測定が有効な場合、ガイドコマンドは無効となり、星が画面上をさまよっているように見えますが、これは全く正常です。ガイダー画像が取得されると、統計情報が計算され、ユーザーインターフェースにリアルタイムで表示されます。約2分間のデータ収集の後、高周波星の動きやポーラアライメントエラーのような不安定な測定値は通常安定し、おそらくそれなりに正確な測定ができるはずです。ポーラアライメントエラーや赤経の未補正周期誤差をより正確に測定したい場合は、GAを最大10分ほど実行させる必要があります。また、計算されたポーラーアライメント誤差は、現在のスコープの赤緯に影響されます。 最も正確な測定を行うには、天の赤道から数度以内、天の子午線付近、つまりキャリブレーションに使用するのと同じエリアにスコープを向ける必要があります。最後に 「ストップ」 ボタンをクリックすると、この段階での測定は終了します。また、「赤緯バックラッシュの測定」 にチェックを入れている場合は、その処理が開始されます(下記参照)。そうでない場合は、ガイドコマンドは再度有効になり、データ収集プロセスは終了します。 その他の計算結果は、テーブルの「その他の星の動き」グループに表示され、全体的なドリフト率やその他のさまざまな測定値が表示されます。 これらの値はすべて、秒角とピクセルの両方の単位で表示されます。 ダイアログボックスは以下のような感じになります。
下の画像の項目 / コントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可の項目)
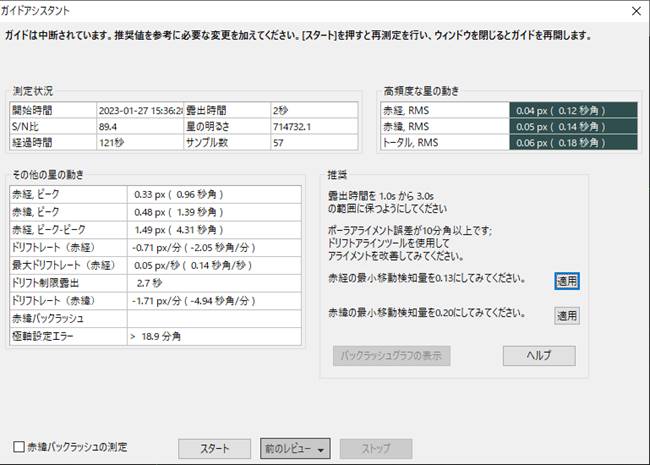
画面の右側にある「推奨」グループの内容は、統計的測定の結果を反映しています。 選択したガイドアルゴリズムが最小移動特性をサポートしていると仮定すると、その結果に基づいて自動的にパラメータを設定するオプションがあります。 また、通常のガイド作業を続ける場合は、測定を再実行するか、ダイアログボックスを完全に閉じるかを選択することができます。
赤緯バックラッシュの測定(赤緯反転遅れ)
「赤緯バックラッシュの測定」 にチェックを入れている場合は、ベースライン測定が終了すると同時にその処理が開始されます。 つまり、「ストップ」ボタンを1回クリックすると、ベースライン測定が中止され、赤緯バックラッシュの測定が開始されます。 ただし、最初のサンプル時間が2分未満だった場合は、ダイアログボックスが表示され、2分の期間が経過するまでGAがサンプル測定を継続することになります。 スタートとストップボタンのすぐ上に、新しいステータスメッセージ群が表示されるので、何が行われているのかがわかります。
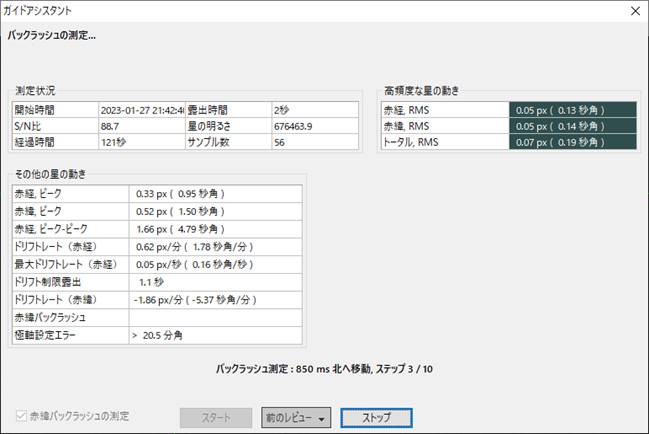
バックラッシュを測定するために、PHD2は星を大きく動かし、まず北の方向に動かし、次に南の方向に戻します。 このとき、星を見失ったり、星がすでにセンサーの北端に近づきすぎている可能性があります。ガイド星は、北に移動できる余裕のあるものを選ぶと、精度が高くなります。自動選択機能がフレームの端に近い主星を選択し続ける場合は、手動で1つのガイド星を選択する必要があります。星が検索領域の外に移動したために失われた場合、詳細設定ダイアログの ガイド タブから、一時的にその領域のサイズを大きくすることができます。検索領域のサイズは20ピクセルでほとんどの構成に対応できます。検索領域内に複数の星がないことを確認してください。バックラッシュ測定の第一段階は、北方向に存在するバックラッシュを解消しようとするものである。 GAでは、ガイド星が一方向に大きく一貫して動くのを確認するまで、この解除コマンドを実行し続けます。これが終わると、GAはさらに一連のコマンドを発行し、星を北に大きく移動させ続けます。 これは少なくとも16秒かかり、設定によってはもっと長くかかるかもしれません - ステータスの更新を見て、何が行われているかを確認できます。北方向のステップが終わると、GAは南方向に同じ数のステップを発行します。 マウントの反動が大きいと、星が南下を始めるまでに時間がかかることがありますが、通常はそれで対応します。南側のステップが完了すると、GA は赤緯ドリフトを補正したバックラッシュ量の正確な推定値を計算しようとします。このような場合、マウントの南側への移動速度が、北側への移動速度の90%以上でなければ、バックラッシュを測定することはできません。これは、通常、赤緯軸の拘束やかなりのアンバランスを意味し、この場合、単純なバックラッシュの測定は不正確で、おそらく無意味なものになるでしょう。「バックラッシュグラフの表示」 ボタンを使用すると、推定値が出なかった場合でも、テスト中に何が起こったかを常に確認することができます。 テストが完了すると、GAは星を開始位置の近くに戻そうとし、ガイドを再有効化します。この場合も、星が失われる可能性はありますが、計算には影響しませんので、通常通りガイドを中断して再開してください。第1段階のベースライン測定とは異なり、バックラッシュ測定が始まったら 「ストップ」 ボタンをクリックする必要はありません。すべてのステップが終了すると測定処理は終了し、通常のガイドが再開されます。ただし、星を失った状態など、何か問題が発生した場合はストップボタンをクリックし、準備が整った時点で再開することができます。バックラッシュのテストが終了すると、先ほどと同じように結果が表示され、赤緯バックラッシュ量と測定の不確かさの項目が追加されます(またはテストに失敗した旨のステータスラインが表示されます)。
下の画像の項目 / コントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可の項目)
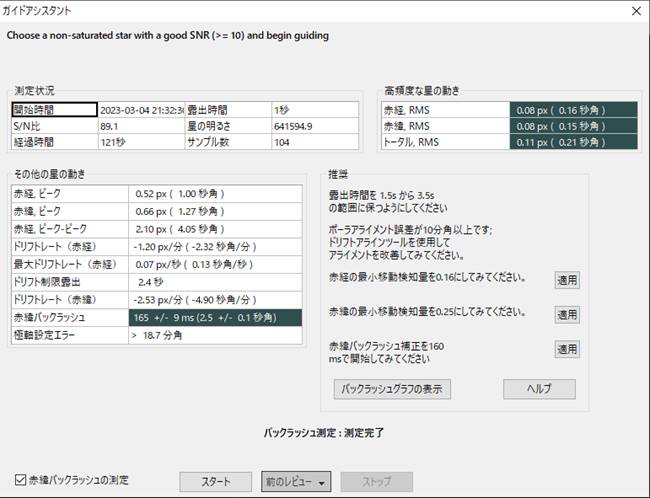
バックラッシュの量に応じて、バックラッシュ補正係数の設定推奨値(上記の例では160ms)が表示されることがあります。このバックラッシュ補正は、多くのマウントコントローラーで提供されている機能とは異なるので、ここで説明します。赤緯バックラッシュ補正 測定値が100ms未満の場合は、このような小さな量ではおそらく補正を行う必要はないため、推奨は行われません。バックラッシュが 3 秒以上と非常に大きい場合は、赤緯で単一方向ガイドを使用するという別の推奨事項が表示されます。これは、このような大きな値を補正しようとしてもうまく機能しない可能性があり、マウントが両方向ガイドをサポートするのに十分な速さで方向を反転できない可能性があるためです。明らかに、マウントがどのように動作するかについての経験に基づいて結論を出してください。測定する前に、マウントソフトウェアで有効になっているバックラッシュ補正を必ず無効にしてください。この操作を行わないと、測定値およびその後のPHD2による補正の試みは無効になります。 一方向ガイドを試したい場合は、次の手順を参照してください。 単一方向赤緯ガイド
バックラッシュの測定結果をグラフ表示することで、テストに失敗した場合でもマウントの性能をより深く理解することができます。 「バックラッシュグラフの表示」 ボタンをクリックすると、次のようなグラフを見ることができます。
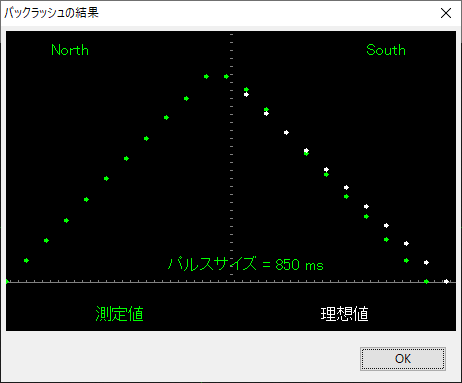
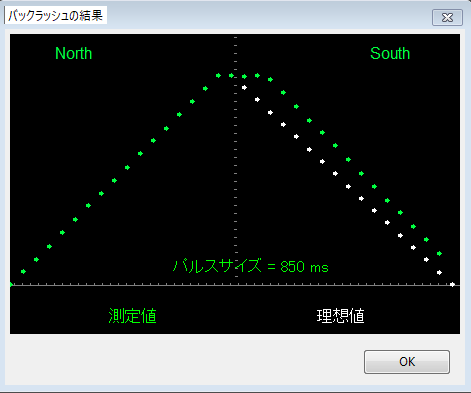
緑色の点は測定された赤緯の位置を示し、左から右に示され、北への移動から始まり、南 (戻り) への移動で終わります。 白い点は、バックラッシュがゼロの完全なマウントの南回帰の動作を示しています。 この例では、緑色の点の上部が平らになっていることからわかるように、わずかなバックラッシュしかありません。 ただし、次の例のように、マウントの赤緯のバックラッシュが大幅に大きい場合、平らな上部がより顕著になります。
画面下部の [前のレビュー] ボタンを押すと、過去3回分のGA結果を確認することができます。バックラッシュテストを随時実施していれば、3回のうち少なくとも1回はバックラッシュの測定結果が含まれているはずです。「レビュー」ボタンをクリックすると、現在のプロファイルに対して GA が実行されたときのタイムスタンプのリストが表示されるので、必要な日付/時刻を選択するだけです。 すべてのグリッド値と推奨事項には、推奨事項を適用するためのアクティブなボタンを含め、選択した GA 実行の結果が入力されます。
キャリブレーションデータの参照
キャリブレーションの健全性チェックなど、キャリブレーション関連の画面のほとんどは、次のような画面を開きます。
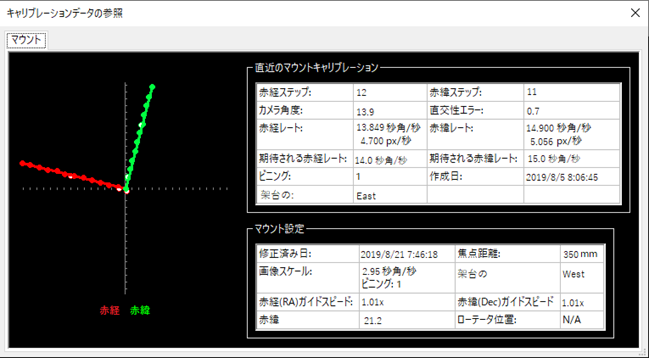
まず左のグラフですが、これはPHD2がキャリブレーション時に送ったガイドパルスの結果、ガイド星が動いたことを表しています。線はマウントの赤経軸と赤緯軸とカメラセンサーのX/Y軸の関係を示しています。これらの線はほぼ垂直であるべきですが、全体の方向は重要ではありません。線上のデータポイントは、決して完全な間隔や位置関係ではありませんが、大きなカーブや鋭い屈折、方向の反転はありません。特に焦点距離の長いスコープでは、線の周りに点が散らばることがよくありますが、これは正常です。実線の点 (西と北のパルス) は、赤経と赤緯の割合を計算するために使用され、空洞の点は東と南への移動の ”戻り”経路を示します。これらは、シーイングによる変動がどの程度発生したか、また、バックラッシュが大きいかどうかを確認するのに役立ちます。詳細設定/ガイドタブの [キャリブレーションやディザー後に素早く中央に戻す] オプションを使用している場合、東と南のパスに表示されるポイントの数は少なくなります。右側の表形式の情報は、スコープのポインティング位置とガイドに関連するさまざまな ASCOM 設定についてわかっていることを示しています。ASCOMマウントを使用しておらず、「Auxマウント」が指定されていない場合、この情報の一部が欠落します。この表には、使用したのと同じ空の位置とガイド速度の設定を使用して完璧なキャリブレーションを行った場合の予想ガイド率も表示されます。この理想的な値を達成することはほぼありませんが、不審な値を警告するアラートメッセージが表示されない限り、気にする必要はないでしょう。キャリブレーション完了時にアラートメッセージが表示されなかった場合は、十分な結果が得られていると思われます。キャリブレーションを長期間にわたって再利用する場合は、この情報を確認し、キャリブレーションが適切に行われ、適切な結果が得られたことを確認するために、数分余計に時間をかける価値があると思われます。キャリブレーション不良は、経験豊富なプロや 高性能なマウントでも起こりうることなので、確認しておくとよいでしょう。
アラートなしのキャリブレーションに一貫して問題がある場合は、キャリブレーションとマウント制御の問題 の項を参照してください。
その他のキャリブレーション関連メニュー
キャリブレーションデータは、キャリブレーションの順序が正常に終了するたびに、自動的に保存されます。キャリブレーションデータの使用方法については、以前のキャリブレーションデータを復元するオプションや、子午線反転後に「反転」させるオプションなど、別の項目(基本的な使い方)で説明しています。これらの機能には、「ツール」メニューの「キャリブレーションデータの操作」サブメニューを使用してアクセスします。つまり、現在のデータをクリアするオプションと、キャリブレーションデータを手動で入力するオプションが表示されます。「キャリブレーションデータクリア...」オプションは、詳細設定 / ガイドタブ ダイアログの [再キャリブレーション] チェックボックスと同じことを実現します - ガイドが再開されるたびに再キャリブレーションが強制されます。「キャリブレーションデータの入力」オプションは、開発作業または専門家による使用を目的としており、ほとんどの場合、完全性を保つために存在しています。
手動ガイド
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。
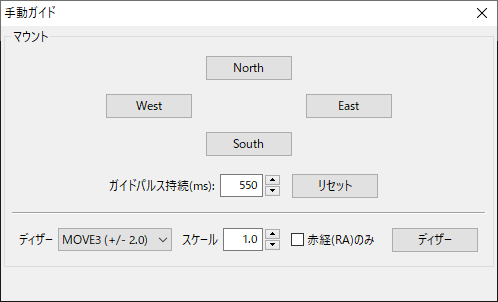
キャリブレーションの問題が発生した場合、PHD2のコマンドがマウントに届き、マウントがそれに従って応答していることを確認する必要があります。あるいは、マウントを微調整したり、手動ディザリングを試してみるのもよいでしょう。「ツール」メニューの「手動ガイド」をクリックすると、マウントをガイドスピードで任意の方向に移動させるためのダイアログが表示されます。適応光学機器を装着している場合、AOと副マウントの両方に別々の移動ボタンが表示されます。 ボタンをクリックするたびに、「ガイドパルス持続」 フィールドで指定された時間のパルスが送信されます。ボタンを押し続けても効果はなく、ボタンをクリックする間にマウントが反応する時間(少なくともガイドパルスの全時間)を与える必要があります。既定値は、詳細設定ダイアログで設定された 「キャリブレーションステップサイズ」です。昼間に、マウントやキャリブレーションの問題をデバッグする場合は、マウントの音を聞いて(見るのではなく)、PHD2からのコマンドを受け取っているかどうかを判断してください。ここでの考え方は、マウントが PHD2 のガイド コマンドに応答しているかどうかを判断することです。 マウントの動きは見えませんが (ガイド速度で動いています)、モーターの音は聞こえるかもしれません。その他、モーターやギアを見たり、スコープにレーザーポインターを取り付けてかなり遠くのものを狙ったり(動作を増幅させるため)することもできます。夜間のテストでは、ここで 説明されている「スタークロス」テストを実施するのが良いでしょう。初心者の方は、プラネタリウムや画像処理アプリケーションが行う旋回操作と、PHD2が行うガイド操作を混同してしまうことがあります。 画像処理アプリが望遠鏡を正しく旋回させることができても、そのマウントがガイド可能かどうかについては何の役にも立ちません。
ディザリングは、主にPHD2サーバーインターフェースを使用した画像撮影や自動化アプリケーションで使用されます。しかし、ダイアログの下部にあるコントロールを使って、手動でディザリングを行ったり、ディザ設定を試したりすることができます。左側の「ディザー」量フィールドは、マウントを移動させる量をピクセル単位で制御します。右側の 「スケール」スピンコントロールを使用することで、この量を調整する(つまり定数を掛ける)ことができます。この2つのコントロールは、ディザリングに使用される最大移動量(スケール × ディザーの積)を設定します。「ディザー」ボタンをクリックすると、PHD2がマウントを東西南北のいずれかの方向に、設定した制限値以下の任意の量だけ移動させます。「赤経(RA)のみ」チェックボックスは、ディザーの調整を東または西のみに制約します。もちろん、この方法で手動ディザーを行う場合、撮像カメラが露出中でないことを確認する必要があります。
スタークロスツール
スタークロスツールは、この キャリブレーションとマウント制御の問題 の項で説明されているように、ガイドコマンドに対するマウントの反応をテストするのに役立ちます。このテストは手動でも簡単に行えますが、このツールを使用する方がよいでしょう。 スタークロスツールでは、次のようなダイアログが表示されます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
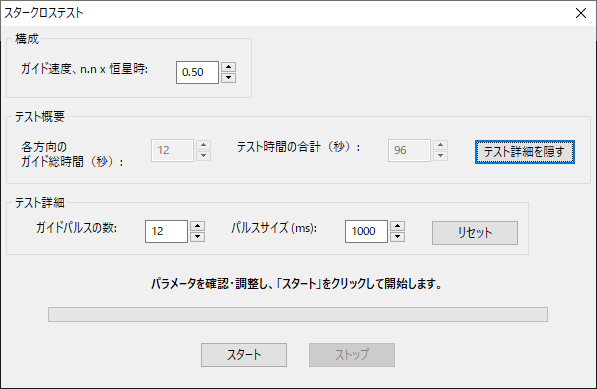
このテストは、メインの画像カメラを使用して画像を露出していることをすることを想定していますが、PHD2 はそのために使用されている画像スケールを認識していません。メインカメラの画像にはっきりとした模様が現れるように、十分な大きさの設定をする必要がありますが、すべての星が視野から外れてしまうほど大きくはありません。既定の設定は、ほとんどのセットアップでうまく機能するはずですが、必要に応じて調整することができます。重要なのは、メインカメラの画像で星の動きを明確に記録し、その画像を生で非圧縮のフォーマット(例えばFITsや非圧縮のTIF)で保存することです。このテストでは、ループは有効ですが、ガイド星は選択されず、個々の星がガイドカメラのフレームから外れても問題ありません。 ループが有効なのは、マウントが動いているかどうかを視覚的に素早く確認するためです。
子午線反転キャリブレーション
子午線反転キャリブレーションツール(ウィザード)を使用して、子午線反転後の逆赤緯出力 設定の正しい値を自動的に決定します。ウィザードを実行するには、架台の東側に置いて1回、西側に置いて1回の計2回のキャリブレーションを行う必要があります。必要に応じて、望遠鏡を回転させる (子午線反転) ように指示されます。 これは、使用するマウントの種類ごとに 1 回だけ実行する必要があります。ウィザードのダイアログに表示されるすべての指示に注意深く従う必要があります。従わなかったり近道をしたりすると、結果が無効になり、単に時間を無駄にするだけです。
彗星追尾
彗星を撮影する場合、PHD2が彗星の頭部をガイド星として使用する方法がありますが、この方法は必ずしもうまくいかない場合があります。例えば、彗星の頭部はガイドに適した星のような中心を示さないことがあります。また、オフアクシスガイドを使用する場合、ガイドカメラに彗星が映らないこともあります。
PHD2には、彗星をガイドすることが困難な場合に使用する「彗星追尾」ツールがあります。これは、通常の星でガイドを行うが、彗星の動き(追尾率)に合わせてロック位置を徐々に移動させるというものです。
PHD2への彗星追尾率の提供方法は、3種類あります。
l 一部のプラネタリウムアプリケーション(特にCartes du Ciel)は、その速度を直接PHD2に送信することができます。
l 追尾率を手動で入力することも可能です。
l PHD2では、撮像カメラで彗星を一定時間追いかけることで、追尾率をトレーニングできます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

手動で入力する場合は、単位に 「秒角/時」、軸に 「マウント(RA/Dec)」を選択し、彗星の天体暦からその値を入力してください。もし、「MinorPlanetCenter」のウェブサイトからレートを取得する場合は、「Separate RA and Declination coordinate motions(赤経と赤緯の座標運動を分離する)」のオプションを選択する必要があります。 PHD2が自動的にレートを調整し、天空の見かけの運動を計算します。
彗星レート トレーニングの仕組みは次のとおりです。
まず、撮影カメラで彗星の中心を合わせます。画像処理アプリケーションにレチクル表示のようなものがあれば、それを使って撮像センサー上の彗星の正確な位置をメモしておくとよいでしょう。この準備ができたら、PHD2でガイド星を選択し、ガイドを開始します。次に彗星追尾ツールの「スタート」をクリックし、トレーニングを開始します。
画像処理アプリケーションのフレームとフォーカス機能を使って、画像処理カメラで短い露出を連続的に撮影します。時間の経過とともに、彗星はスタート地点から遠ざかっていきます。PHD2の「ロック位置の調整」操作で、彗星をスタート地点に戻します。PHD2のUp/Down/Left/Rightの操作に対して、撮影カメラのセンサー上で彗星がどの方向に動くかは、少し試してみる必要があるかもしれません。ロック位置の調整画面の 「常に最上部に表示」ボタンを有効にすると、画像処理アプリケーションの最上部にコントロールが表示されたままになるので便利です。
彗星を再中心化すると、PHD2が彗星追尾率をすぐに学習します。PHD2が彗星を追尾していることを確認したら、「ストップ」をクリックして、トレーニングを終了します。PHD2は、「有効化/無効化」ボタンで彗星追尾を無効にするまで、ロック位置を移動して彗星を追尾し続けます。
内蔵のカメラシミュレータを使って、彗星トレーニングを練習することができます。メイン画面/カメラ設定ダイアログの 「彗星」にチェックを入れると、シミュレータに彗星が表示されます。ブックマークを使用して彗星の開始位置をマークし、「ロック位置調整」コントロールを使って、彗星をブックマークの位置に戻します。
ロック位置
PHD2は通常、キャリブレーション終了時にガイド星が位置する「ロック位置」を設定します。キャリブレーション順序の詳細によっては、キャリブレーション開始時の星の位置が正確でなく、数ピクセルずれている可能性があります。キャリブレーション後に目標を正確に中央に合わせようとする場合、[ロック位置保持] を使用するとよいでしょう。キャリブレーション前にガイド星をクリックし、「ツール」メニューの「ロック位置の調整」ダイアログで 「ロック位置保持」を設定することで実現します。キャリブレーションが完了すると、PHD2 は星が 「ロック位置保持」の位置に来るまでマウントを動かし続けます。 したがって、PHD2 がガイド速度でスコープを再配置する間、キャリブレーション後に追加の遅延が発生する場合があります。ディザリングなどの操作でロック位置を変更しない限り、ガイドを停止し、その後再開しても、「ロック位置保持」は使用され続けます。繰り返しますが、これにより、PHD2 がマウントを再配置するために必要な遅延を犠牲にして、ガイド星 (おそらく画像目標) の厳密な配置が保証されます。
ガイド開始後にカメラセンサー上のガイド星の位置を微調整する必要がある場合は、「ツール」メニューの「ロック位置の調整」機能を使用することができます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

ガイド星を少しずつ (ガイド速度で) 微調整するか、新しいロック位置を入力して [セット] をクリックすることで大きく動かすことができます。Up/Down/Left/Rightボタンをクリックすると、ロック位置が対応する方向に「ステップ」で示される量だけ対応する方向に移動し、修正されたロック位置が表示されます。新しいロック位置を入力すると、 新しい位置が現在の検索領域の外にある場合、ガイド星を失うリスクがあります。このツールは、分光観測などでガイド星や撮像対象を正確に位置決めする必要がある場合に有効ですが、ほとんどのユーザーには必要ありません。
PHD2サーバー
PHD2 は、ガイド操作を制御する必要があるサードパーティの画像処理および自動化アプリケーションをサポートしています。 近年、多くの新しい自動化アプリケーションが利用できるようになり、それらのほぼすべてが PHD2 サーバーインターフェイスを使用しています。これをを使用することで、PHD2ガイドの起動/停止、一時停止/再開、ディザリング/セット、キャリブレーション、プロファイルロードなど、PHD2ガイドに関連するすべての典型的な動作を制御できます。このタイプの自動化アプリケーションを使用するには、「ツール」メニューの「サーバーを有効化」オプションが有効になっていることを確認する必要があります。このオプションを有効にすると、PHD2がネットワーク接続を使用できるようにOSのファイアウォールを設定する必要がありますが、これは通常PHD2のインストールの一部として行われるものです。
サーバAPIのドキュメントは、PHD2 Wiki ( https://github.com/OpenPHDGuiding/phd2/wiki ) で公開されています。