トラブルシューティングと分析
一般的トラブルシューティング
2013年の最初のリリース以来、世界中の何千人ものユーザーが参加したPHD2の現場経験から、人々が “ガイドの問題”と考えていることの99%は、実際にはまったくそうではないことがわかりました。 その代わりに、それらは通常2つの原因から来るものです。
1) ユーザーによる操作ミス
2) マウントまたはマウントに乗っている物理的な機器の機械的な問題
困難にぶつかり、思うような結果が得られないときに、このことを思い出すことが重要です。PHD2ウェブサイト(またはこの内蔵ヘルプ)のドキュメントを注意深く調べ、最善の方法 ドキュメントに記載された手順に従い、PHD2サポートフォーラムの「検索」ツールを使用することにより、操作ミスを避けることができます。YouTubeの動画は、PHD2プロジェクトに近い人物が作成した場合を除き、品質にばらつきがあり、誤解を招いたり、時には良いアドバイスと悪いアドバイスが混在していることもあるので、見るときには注意が必要です。よくある間違いのひとつに、PHD2のガイドパラメータを乱暴に変更し、セットアップに存在する機械的な問題を修正しようとする試みがあります。 これは事態を悪化させるだけです。PHD2が計算する既定のガイドパラメータは、新プロファイルウィザードで入力されたパラメータを反映しているため、すでに設定に合わせて調整されています。機器の挙動が良ければすぐにでもそれなりの結果が得られるはずですし、そうでない場合は操作ミスや機械的な問題があるのでしょう。機械的な問題に直面するのは悔しいことですが、修理やその影響を軽減しようとする前に、問題を切り分け、特定し、理解することが重要です。機械的な問題は、簡単に解決できるものではありません。 たとえ一時的に治まっても、必ず戻ってくるのです。 先週、あるいは昨夜までうまくいっていたものが、もううまくいかなくなることもあります。
PHD2 やその他のガイドソフトウェアは、ガイドに必要な精度のレベルが非常に高いため、しばしば悪い知らせを伝えます。現代のガイドカメラは、人間の髪の毛の太さが約50ミクロンであるのに対し、数ミクロン単位で動きを計測することができます。ガイドを試すまでは、メーカーによってさえ、このレベルの精度で機器のセットアップがテストまたは測定されたことはおそらくないでしょう。初心者は、スコープとマウントが十分に旋回し、空を適度に追跡し、様々なプラネタリウムのアプリケーションで文句なしに動かすことができ、見た目もよくできているので、機械的な問題を否定することがよくあります。さらに悪いことに、高価だったのです。 しかし、1時間ごとに、地平線から地平線まで、サブ秒角の精度で空を追跡するために、あらゆる機器をそろえようとするならば、これらのどれも重要ではありません。幸いなことに、ほとんどの機械的な問題は、かなり簡単に、あるいは少なくとも大きな経済的負担をかけることなく、解消または軽減することができます。PHD2はそのための優れたツールです。ほとんどの人にとって、問題を解決するためのコストは、トラブルシューティングに費やす時間、イメージングの機会の損失、および一般的な期待外れから生じます。 しかし、これらの問題は趣味の一部であり、ほとんどの成功した撮影者はそれらを解決する方法を学んでいます。
望遠鏡のマウントで一般的に見られる機械的な問題の種類に慣れていない場合は、こちらで簡単に紹介されています。 マウントの一般的な問題 また、ガイドスコープ、カメラ取り付け、ケーブルの取り回しなど、メインスコープやマウントへの撮影関連機材の取り付け方によっても、さまざまな問題が発生することがあります。これらの部品がたるんだり、引きずったり、勝手に動いたりすると、マウントの追跡問題に見せかけて、不要なガイド星の動きが発生します。もし、全体的なガイド結果に満足できない場合は、慎重かつ体系的に原因を特定する作業を進めるべきです。トラブルシューティングの簡単な対策を次に示します。
1. ガイドスコープの焦点距離、マウントガイドの速度、手動で入力した場合はカメラのピクセルサイズなど、新規プロファイルウィザードで入力したパラメータが正確であることを確認してください。間違いが見つかった場合は、手動で修正しようとせず、新しいプロファイルウィザードを再実行します。
2. 安定した、合理的な見栄えの空の画像を提供する信頼性の高いカメラ運用を心がけてください。この領域で問題が発生した場合は、次の手順で対処してください。カメラのタイムアウトと接続の問題
3. 2秒のガイドカメラ露出を使用する場合、ガイドカメラのピントが合っているか、失われた星のメッセージが頻繁に表示されないか確認してください。ピントを合わせるためのコツはこちらで解説しています。星のプロファイルとターゲット表示 同じメーカーの撮影用カメラとガイドカメラを使用している場合、PHD2が正しいカメラに接続されていることを確認してください。
4. 機械的なポーラアライメント(天体の極から約 10 分角以内のもの)を適切に取ります。これを行うには、マウントまたはウェッジの機械的調整が必要です - そのためには、留め具を緩めたり、ノブを回したりする必要があり、ソフトウェアだけではできません。ポーラアライメントスコープ、高倍率アイピース、ポーラアライメントを補助する他のアプリ、またはPHD2のポーラアライメントツールのいずれかを使用することができます。高い精度は必要ありません、”近い”だけで十分なのです。
5. PHD2で使えるキャリブレーション、つまりエラーメッセージや "警告"を発生させないキャリブレーションを実現することに集中してください。場所の条件が許せば、-20 ~ +20 度の赤緯範囲と赤経(時角) でスコープをポイントして、スコープを東西の地平線より十分に上に向けた状態でキャリブレーションします。現場での視認性に制約がある場合は、上記の目標にできるだけ近づけてください。エラーメッセージ (キャリブレーションの失敗) が表示された場合、または画面の上部に警告メッセージが表示された場合は、次のアドバイスに従ってください。キャリブレーションとマウント制御の問題 キャリブレーションは、その後に続くすべてのガイド活動の基礎となるため、このステップで実行可能な結果を得ることが重要です。
6. ガイドアシスタント ツールを使って、ガイドなしでマウントがどのように追跡し、どのように動作するかを調べます。ガイドアシスタントを使用して赤緯バックラッシュを測定し、測定作業が終了したら、表示される推奨事項を適用してください。 その作業中に、大きく突然のガイド星の回遊や、その他の不可解な結果が出た場合は、まずその問題を解決してください。
7. 同じ領域で、15~20分のガイド作業を実行します。 状況を改善しようとして、ガイドパラメータを変更しないでください。
8. PHD2 ログビューアツールを使用して、結果を分析し、明らかになった問題を解決するための戦略を立てます。 PHD2のサポートフォーラムで、この作業を行うための助けを得ることができます。
ガイド星の大きい急激なたわみ
ほとんどのユーザーは最終的に、ガイド星がロック位置から急に大きくずれて見える場面に遭遇します。これらの問題の大半は、マウントやPHD2のガイドコマンドに起因するものではありません。 マウントの上に乗っているギア、特にガイドカメラとガイドスコープの装置で、不要な機械的動きが発生することがほとんどです。これは、赤緯で大きなたわみが発生する場合に特に当てはまります。これは、赤緯モーターが受信する非常に短く、比較的まれなガイドコマンドを実行する場合を除き、通常はアイドル状態であるためです。 望ましくない機械的な動きは、通常いくつかの原因から発生します。
1. マウントが対象物を追跡している間に変化する重力の結果、ガイド装置の様々なコンポーネントの小さな動き
2. ケーブル(特にガイドカメラに接続されているもの)の引きずり、巻き付き、引っかかり
3. 突風または、あまり一般的ではないカメラフィルターの変更、オートフォーカス、またはミラーの動きによる影響
4. バックラッシュ補正のためのマウント機能の使用 - PHD2 ガイドでは使用しないでください。
これらを問題の原因となる可能性があるとして拒否する前に、前の項目で説明した小さな測定調整と公差についてもう一度考えてみてください。多くのガイド設定では、わずか5ミクロンの移動で、星の直径の何倍にも相当する6秒角以上の見かけ上の追跡エラー(ガイド星のたわみ)が発生することがあります。すべての機器、すべてのネジ、すべての可動部品は、このわずかな量によって、自ら移動する可能性があります。ケーブルが意図的に配線を行った場合でも、特定の空の位置で、または子午線の反転後に、ケーブルが拘束されたり引っ張られたりすることがあります。ケーブル結束バンドやリブ付きプラスチックケーブルガイドは、小さな突起があり、マウントの固定部分に一瞬引っかかることがあります。 大きなたわみがある場合、これらのことが関係しているかどうかを判断するのは簡単です。PHDログビューアツールで注目する時間を拡大し、たわみの直前に、それに対応する移動方向への大きなガイドコマンドがあったかどうかを確認するだけです。ほとんどの場合、このようなことはなかったと分かるはずです。赤緯バックラッシュ補正を使用している場合、ガイド作業の最初に起こることもありますが、そういった事象はすぐに消えるはずです。赤経で急激なたわみが発生した場合、赤経のモーターが連続運転するため、解析は容易ではありません。しかし、その場合でも異常に大きく、ランダムな空間でのたわみは、赤経駆動システムのエラーというよりも、ここで述べたような機械的な問題から発生する可能性が高いです。
カメラのタイムアウトと接続の問題
ガイダー画像がダウンロードされない、表示されないという問題が発生する場合があります。 極端な場合、PHD2や他のカメラ関連アプリケーションが応答しなくなる(手詰まりする)こともあります。 この現象は、ほとんどの場合、ハードウェア、カメラドライバ、または接続の問題によるもので、最も一般的な原因の1つは、USBケーブルまたは機器の不具合です。 PHD2のようなアプリケーションが原因である可能性は極めて低いので、システムの下層部から調査を開始する必要があります。
これらの問題を検出し、この “手詰まり”を回避するために、PHD2はカメラのタイムアウト/再試行機構を使用しています。このタイムアウト値は、詳細設定の カメラ タブで設定し、既定値である15秒を使用します。これは、PHD2がカメラからの画像を受信するために、露出完了予定時刻から最大で15秒待つことを意味します。これは非常に余裕のある時間であり、ほとんどのカメラでうまく機能するはずです。タイムアウトが発生すると、PHD2は自動的にカメラの接続を解除し、再接続を試みます。画面の上部にアラートメッセージが表示され、タイムアウトの発生と、再接続の試行が成功したかどうかが通知されます。 再接続が成功したかどうかに関係なく、注意が必要な何らかのハードウェアの問題があります。
ここで、再現してから問題を特定するための手法を紹介します。
1. PHD2が最新版であることを確認してください - 開発版と、カメラドライバの最新版を用意します。カメラ業者の中には、頻繁にソフトウェアの変更を行うところがあり、PHD2が使用するソフトウェアライブラリもそれに合わせて変更する必要があります。 これらのアップデートが後方互換性がない場合、すべてを最新バージョンで実行するほかありません。
2. ガイドカメラが基本的に機能していることを確認します。カメラからコンピューターへの短い直接ケーブルを使用し、カメラに付属の純正アプリケーションまたはテストアプリケーションで露出を取得してみてください。
3. ステップ2を繰り返しますが、アプリケーションとしてPHD2を使用します。 昼間はカメラに接続して1~2秒の露出をそれなりに長くループさせるだけでOKです。昼間はPHD2の表示が真っ白になることが多いのですが、エラーメッセージが出ずにループが続いていれば、大丈夫です。このステップで問題が発生しても、それがPHD2の問題であるとは限りません。他の多くのアプリがビデオストリーミングモードでカメラを使用するのに対し、PHD2は単一露出モードでカメラを使用しているという違いがあります。単一露出モードでは、カメラとのデータのやり取りが多くなり、ドライバでタイミングの問題が発生する可能性があります。
4. ステップ3で失敗を誘発できない場合は、撮影カメラを追加してください。 画像処理アプリケーションを使用して、PHD2が行っていることと並行して露出をループさせます。 これにより、USBシステムの通信と帯域幅の問題を明らかにすることができます。
5. ステップ4で長期間にわたって問題が発生しない場合、最初に問題が発生したときと同じUSBケーブルとホストコンピュータを使用してください。 すでにそうしている場合は、他の可能性を検討する必要があります。
a. この問題は、気温に関係している可能性があります。おそらく、夜間の寒い環境では発生しますが、昼間は発生しません。
b. OSが節電のために1つ以上のUSBポートを一時停止している可能性があります。 Windows 10 以降のリリースでは、このような問題が多くなっています。Windowsのデバイスマネージャーを使用して、USB「ハブ」またはUSBコントローラを参照しているすべての項目を検索します。これらの項目ごとに、プロパティダイアログを開き、「電源管理」タブをクリックします。 OS が電源管理の理由でデバイスを一時停止できるようにするアクセス許可を無効にします。
c. テスト用コンピュータの電源が、画像処理に使用するコンピュータの電源と同じであることを確認します。 この時点では、どちらもA/C電源で動作しているはずです。
d. この問題は、ケーブルの接続が緩んでいることが引き金になっている可能性があります。画像処理中にケーブルが移動しても、ケーブルの接続が失われることはありません。
タイムアウトの問題を再現できる場合、まずUSBケーブル、次にシステム上の他のUSBコンポーネントを調べます。USB関連の問題の原因としては、以下のようなものがあります。
l USBケーブルの品質が低い、または少し傷んでいる - 近年、カメラメーカーの中には、カメラと一緒に低品質のUSBケーブルを出荷するところもあるため、カメラに付属のものが使えるとは思わないほうがよいでしょう。また、私たちは撮影中、過酷な環境で作業しており、私たちが使用している部品の多くは、寒冷な屋外環境用に設計されていないことを忘れてはいけません。定期的に機材を分解して組み立てていると、ケーブルのたわみによって低品質の導体が損傷することがあります。そのため、先週や先月まで使えたものが、もはや信頼できなくなる可能性があります。 24AWGの導体で、長さが15フィート以下の高品質USBケーブルをお勧めします。
l USB-2カメラとUSB-3ポートに挿したケーブル。これらの組み合わせは後方互換性があるとされていますが、それはハードウェアレベルの話であって、ドライバーの実装には悪影響が出る可能性があります。
l OSによるUSBポート停止(上記ステップ5b)
l ガイドカメラへのわずかな電力供給 - メイン撮像カメラにはおそらく独自の電源がありますが、ガイドカメラなどの他のデバイスは通常、USB ケーブル経由で給電されます。特にノートパソコンや安価なパソコンでは、給電可能なUSBハブを使用してカメラに電力を供給してみるのもよいでしょう。 また、寒冷地での使用や最大長のケーブルを使用する場合にも、この方法が必要になることがあります。
この時点で問題の切り分けができない場合、他にもいくつか見るべきところがあります。
l USB ポートとUSB コントローラのツリー構造をマッピングするには、Microsoft ツール (USB ビュー) を使用します。
l 画像処理用カメラとガイドカメラを別々のUSBバスで管理できるポートを選んでみてください。
l 別のカメラドライバを使用してみてください。 多くのメーカーが ASCOM とネイティブドライバーの両方を提供しているため、使用していないドライバを試してください。 バグ修正と互換性に関して、一部の ASCOM ドライバがネイティブドライバに遅れをとることは珍しくありません。
l 問題がUSB全体の帯域幅に関連しているかどうかを確認し、USBの総使用量を減らしてみてください。
a. 可能であれば、撮像カメラのUSB使用制限を緩める - 多くのドライバはそれを可能にします。
b. 画像スケールが6 秒角/px を超える結果にならない限り、ガイドカメラを使用しない。
c. カメラドライバが対応している場合は、PHD2のサブフレームを使用します。
d. 撮像中に他のプロセッサ負荷の高いアプリケーションを実行したり、プラネタリウムのアプリケーションでデバイスや他のアプリケーションを高速で操作しないでください。
キャリブレーションとマウント制御の問題
PHD2を使い始めたばかり、または初めて新しい機器に接続する場合、キャリブレーションがうまくいかないことがあります。 このリスクを最小化する最善の方法は、キャリブレーションアシスタント を使用することであり、初心者の方はそうすることを強くお勧めします。この問題は、1)マウントが赤経と赤緯で十分に移動しなかったためにキャリブレーションが完全に失敗した場合、2)キャリブレーションは完了したが結果が疑わしい場合、の2つの形態に分かれます。 どちらの場合も、PHD2画面の上部にアラートメッセージで表示されます。 キャリブレーションが失敗した場合、2つの理由が考えられます。
1. マウント/接続の問題や操作ミス - これらは、最も一般的な問題の発生源です。 これらのトラブルシューティングに最適なツールは、「ツール」メニューの「手動ガイド」ダイアログまたは「スタークロステスト」で、このヘルプドキュメントの ツール の章で説明されています。画像表示画面で星を見ながら、「手動ガイド」画面で方向キーを使い、マウントに直接コマンドを送るだけです。ガイドパルスの量は、最低でも数秒とかなり大きくして、マウントが動いているかどうかがはっきりわかるようにします。マウントを4方向に動かしてみて、目的の星がほぼ同じ量だけ動いていることを確認します。 マウントが反応しない場合は、ハードウェアか接続の問題があることがわかります。操作上、天の極の近くを指している場合、またはマウントが適切に初期化されておらず、固定されておらず、恒星数で追跡されていない場合、キャリブレーションを完了することはできません。Shoestringデバイスを使ってマウントに接続している場合は、そのインジケータランプを見て、コマンドが届いているかどうかを確認します。同様に、ST-4対応ガイドカメラには、ガイドコマンドを受信したことを示すインジケーターランプがある場合があります。 マウントにASCOM接続を使用している場合、COMポートの割り当てが正しく、機器に適したASCOMマウントドライバを選択していることを確認してください。 ASCOMドライバがマウントと正しく通信していることを確認するために、POTHなどASCOMが提供するいくつかのツールを使用することができます。 パルスガイドを確実にサポートするために、マウント用のASCOMドライバの最新バージョンを使用するのが最善です。
2. キャリブレーションのステップサイズが正しくない - 新しいプロファイルウィザードを使用して、焦点距離、カメラのピクセルサイズ、マウントのガイドスピードが正しい値であれば、キャリブレーションで使用する「ステップサイズ」はすでに正しいはずです。しかし、初心者の方は、これらのパラメータに誤った値を入力することが多いので、確認が必要です。プロファイルを手作業で定義または修正した場合(悪い考えです)、またはマウントのガイド速度設定を変更した場合は、詳細設定 の 「ガイド」 タブで [キャリブレーションステップ] パラメータを調整する必要があります。そこにあるヘルプコンテンツに、このパラメータの使用方法が書かれているので、すぐに問題を解決できるはずです。 しかし、新しいプロファイルウィザードを注意深く使ったにもかかわらず、ガイド星の動きが小さすぎる、あるいは全くないという問題が発生した場合、おそらく問題は別のところにあるのでしょう。
また、キャリブレーションが完了しても、PHD2が “一部の結果に疑問があります”というキャリブレーション警告メッセージを表示することがあります。この場合も、キャリブレーションアシスタント(CA)を使用することで、このようなアラートが出る可能性を最小限に抑えることができます。CAを使用中にアラートが発生した場合でも、キャリブレーション中にどのような問題が発生したかについて、より具体的な説明を受けることができます。いずれにせよ、アラートメッセージはキャリブレーションの失敗や使用不能を意味するものではありません。このような「キャリブレーションチェック」ダイアログでは、問題の説明とキャリブレーション結果のいくつかの詳細が表示されます。
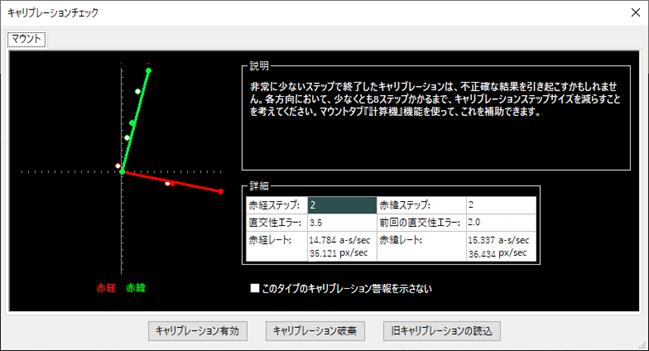
現在、PHD2がキャリブレーションの一環としてチェックしているものは4つあります。
l ステップ数が少なすぎる(上図)- この問題は、マウントが実際に正しく動作していれば、簡単に解決することができます。 西と北の両方のキャリブレーションで少なくとも8ステップになるまで、キャリブレーションステップサイズを下方に調整するだけです。 新しいプロファイルウィザードを使用して設定を行った場合、キャリブレーションステップサイズの適切な開始値はすでに設定されています。その場合、この警告は、新しいプロファイルウィザードでパラメータの入力が間違っているか、マウントガイドの速度が変更されたことを示唆しています。 これらを確認して、正しいことを確認する必要があります。 赤経と赤緯のステップ数が大幅に異なる場合は、2軸で異なるガイド速度設定を使用していない限り、赤緯バックラッシュの証拠が見られると思われます。
l 直交性エラー - カメラ軸は本来垂直であるべきですが、通常は独立して計算されます。 角度の計算はそれほど精度を必要としませんが、著しく直交していない場合は、キャリブレーションを繰り返す必要があります。この種のアラートが繰り返し表示され、軸が著しく直交していない場合は、問題を特定し修正する必要があります。 一般的な原因は、極座標のアライメント不良、大きな赤緯バックラッシュ、または赤経の大きな周期的な誤差です。これらの問題は、PHD2が他の軸の動きを測定している間に、ガイド星が一方の軸で大きく動いてしまう可能性があります。これらの問題が疑われる場合は、先にキャリブレーションを受け入れ、その後、ガイドアシスタントを実行して、極アライメント誤差、赤緯バックラッシュ、および赤経トラッキング誤差を測定してください。また、マウントが全く動いておらず、測定された星の変位がシーイング効果によるものである場合もあります。 この種の問題は、ダイアログの左側にあるキャリブレーショングラフで明らかになるはずです。 軸の誤差が比較的小さく、ハードウェアが正常に動作していると確信できる場合は、詳細設定ダイアログの「ガイド」タブで 「赤経と赤緯が直交すると仮定」 オプションを設定すれば、この種の警告をさらに避けることができます。しかし、これはエラーがかなり小さい場合にのみ行うべきで、そうでない場合は深刻な問題を単に無視していることになります。
l 疑わしい赤経と赤緯レート - マウントから報告されたガイド速度が正確であると仮定すると、赤経のガイド速度の測定値は、赤緯のガイド速度とほぼコサイン(赤緯)の係数で関連しているはずです。つまり、見かけの赤経は、スコープを極に近づければ近づけるほど小さくなります。 PHD2は、どのレートが正しくないかを特定しようとはしません - 単に、レートがおかしいと警告しているだけです。 これらのレートを自分でチェックするのは簡単です。恒星数の1倍でガイドする場合、赤緯ガイド率は約15秒角/秒、恒星数の0.5倍でガイドする場合、赤緯ガイド率は7.5秒角/秒、といった具合です。赤経よりかなり小さい赤緯は、赤緯のバックラッシュを示しています。この警告を発したキャリブレーションを使用すると、実際のガイドレートが測定値よりも大きい可能性があるため、赤緯ガイドのオーバーシュートにつながることがあります。 この問題を回避するには、キャリブレーションを開始する前に、赤緯バックラッシュを手動でクリアする必要があります。これは 2 つの方法のいずれかで行うことができます: 1) マウントの最後の旋回方向が北であることを確認するか、2) ハンドコントローラを使用して手動でマウントを北 (「上」矢印) にガイド速度で 10 ~ 20 秒間移動します。
l 矛盾した結果 - キャリブレーション結果が前回使用したキャリブレーションと大きく異なる場合、アラートメッセージが表示されます。 これは、設定を変更したために起こる可能性があります。実際の問題を意味するものではありませんが、新しい設定用に別のプロファイルを作成することを検討する必要があるかもしれません。 そうすることで、PHD2は各プロファイルの設定を記憶し、簡単に切り替えることができます。 もし、設定を変更していないのであれば、なぜこのように結果が異なるのか、その原因を突き止める必要があります。
これらの警告では、メッセージの種類に応じて、関連するデータフィールドが強調表示されます。 警告を無視する(「キャリブレーション有効」)、キャリブレーションを再実行する(「キャリブレーション破棄」)、または前回の良好なキャリブレーションを復元する(「旧キャリブレーションの読込」)を選択することができます。3番目のオプションでは、キャリブレーションを後日まで延期し、最後に良好なキャリブレーションデータを使用してガイドを開始することができます。 同じトピックのアラートが繰り返し表示され、本当に問題がないと確信した場合、「このタイプのキャリブレーション警報を示さない」チェックボックスを使用して、そのタイプのアラートを今後ブロックすることができます。 しかし、PHD2が使用するキャリブレーションチェックは様々な機器に有効であり、ほとんどのユーザーはこれらのキャリブレーションアラートがまったく表示されないことに注意してください。
赤緯バックラッシュ
キャリブレーションの問題で最も多いのは赤緯のバックラッシュで、これはほとんどのギアマウントにある程度存在するものです。 バックラッシュは、軸の運動方向が逆になったときに発生します。モーターが回転しているにもかかわらず、望遠鏡がすぐに逆方向に動き出さないことがあります。その原因は、ドライブトレインのギアの噛み合わせが緩いことが一般的です。多くの安価なマウントでは、軸が正しい方向に動き始めるまでに数秒かかることがあり、これがキャリブレーションやガイドの結果を悪くする原因となります。次のキャリブレーションデータの参照ダイアログの例を考えてみましょう。
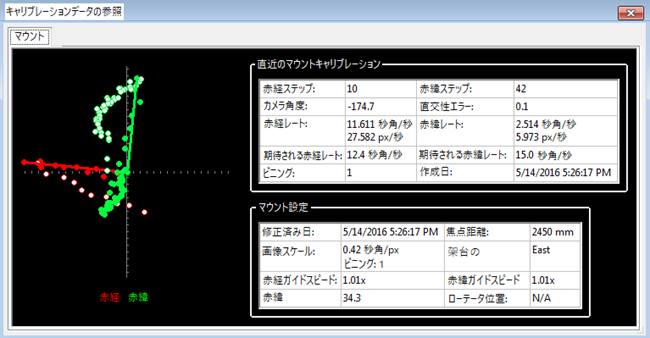
この問題の最初の手がかりは、2軸のキャリブレーションに必要なステップ数(赤経は10ステップ、赤緯は42ステップ)を比較することで得られます。これは、おそらくバックラッシュが解消されていなかったため、マウントが一貫して赤緯方向に動いていなかったことを示しています。これは、ガイドコマンドが北から南に逆になったときの赤緯点 (薄緑) の "さまよう" 動作も説明しています。最後に、2つの軸のガイド速度設定が同じであるにもかかわらず、計算された赤緯率は赤経率よりもはるかに小さいです。 実際、これによってキャリブレーション警告ダイアログが表示されたはずです。実は、ここには2つの問題があります。 まず、キャリブレーションの結果が悪いので、より正確な赤緯ガイド率を測定するために、キャリブレーションを繰り返す必要があります。 第二に、たとえ赤緯ガイド率が正しくても、赤緯の方向転換時にマウントが悪い動きをする可能性があることです。次の手順を実行すると、キャリブレーションを改善できます。
l 使用可能な星があるフィールドで、できれば赤緯 = 0付近、天の子午線から15度以内で、ガイドカメラのループ露出を開始します。
l ハンドコントローラを使い、画面の星が動くまで、マウントを北('上'矢印)に移動させます。
l キャリブレーションを開始する。
これで、マウントの赤緯のバックラッシュはほとんど解消され、キャリブレーションの結果も良くなるはずです。バックラッシュの問題は、一般的にマウントに何らかの機械的な調整が必要です。 マウントのガイド速度が1倍速に近いものでなければ、マウントのガイド速度を上げることですぐに改善できるかもしれません。また、PHD2のバックラッシュ補正の設定を使ってみるのも良いですが、バックラッシュが3秒以上など大きい場合はうまくいかない可能性があります。バックラッシュを修正できない場合や、管理可能なレベルまで減らすことができない場合は、赤緯に一方向のガイドを選択することを検討する必要があります。そのためには、ポーラアライメントエラーによってマウントがどちらにドリフトするかを判断し、PHD2に反対方向にのみガイドするように指示します。(単一方向赤緯ガイドを参照) これは、「詳細設定」ダイアログの 「アルゴリズム」タブにある 「赤緯ガイドモード」コントロールによって制御されます。 たとえば、マウントが全体的に北に流れる傾向がある場合は、ガイドコマンドを南のみに制限します。 これは明らかに理想的な解決策ではありませんが、適度に長い露出を使用して良好なガイド結果を得ることができます。
アラートメッセージなしでキャリブレーションが完了するまでに何度も問題がある場合は、マウントがガイドコマンドに応答しているかどうかを確認するために、非常に簡単なテストを実行する必要があります。 このテストは、基本的にキャリブレーション中に行われることを模倣していますが、より直接的であり、何が起こっているかをよりよく感じることができます. これを「スタークロス」テストと呼びます。 アイデアは、メインの撮影カメラのシャッターを開き、ガイドコマンドを送信して、フィールド内の星が独特の十字パターンを描くようにすることです。 つまり、次のような画像を取得する必要があります。

角度の方向は重要ではありません。それは、ガイドカメラをどのように回転させるかによるものです。 重要なのは、十字線が垂直で、中央の始点に対して4方向それぞれにほぼ同じ長さを持っていることです。 もし、このような画像にならない場合、ガイドに支障をきたすか、あるいは不可能となります。 例えば、次のような悪い結果を考えてみましょう。

この例では、星が1つの軸(この例では右上がりのみ)に沿って移動しているのがわかる。マウントに送られた赤緯ガイドコマンドは、まったく何もしていません。 この問題が解決されるまでは、赤緯ガイドが全くできず、キャリブレーションを完了するにも赤緯ガイドを無効にしなければならないでしょう。 このほかにも、マウントやガイドケーブル、あるいはマウントのASCOMドライバに問題がある可能性が高いなど、さまざまな組み合わせで悪い結果が出ることがあります。 PHD2とは無関係と見て間違いないでしょう。
スタークロスツール を使用して自動的に実行出来るテストの手順は次のとおりです。
1. マウントガイドの速度を恒星時の 1倍に設定します。PHD2の「手動ガイド」ツールを起動し、「ガイドパルスの持続時間」の初期値を選択します。たとえば、5 秒から始めます。
2. メインカメラで60秒の露出を開始します。
3. 西に5秒パルス、次に東に5秒パルスを2回、最後に西に5秒パルスを送ります。 これで、星はおおよそ開始位置に戻るはずです。 各ガイドパルスを送った後、次のパルスを送る前にコマンドが完了する時間を与えるため、約5秒待つ必要がある。
4. 次に、北に5秒パルスを送り、南に5秒パルスを2回送り、最後に北に5秒パルスを送ります。 これで再び星が開始位置に戻るはずです。
5. メインカメラの画像がダウンロードされるのを待ち、何が得られるか確認してください。
必要であれば、異なるパルス長を使用することができ、おそらくマウントが反応することを確認するために小さな値を使用します。 ただ、メインカメラの露出時間が、ガイド持続時間の合計に誤差を加えた時間より長いことを確認してください。ほとんどのマウントでは、赤緯のバックラッシュがあるため、星は正確な中心には戻りません(最初の例の画像で確認できます)。 しかし、かなり近い位置でなければなりませんし、マウントの赤緯バックラッシュがどの程度あるのか、もっと注意深く見る必要があります。
このテストの利点は、マウントが指示通りに動くか、動かないかという基本的なことに絞られることです。 PHD2のガイド設定はこのテストには関係ありません。 テスト結果は、マウントメーカーや、マウントの種類とその典型的な問題を理解している他のユーザーとのコミュニケーションに役立つと思われます。
マウント動作の測定
ガイドの結果がうまくいかない場合、おそらく最初の直感は、魔法の解決策を見つけるために、ガイドのパラメータに乱暴な変更を加えてみることでしょう。 これはほとんどうまくいかず、むしろ事態を悪化させる可能性が高いです。 新しいプロファイルウィザードの既定パラメータで妥当な結果が得られない場合は、おそらくハードウェアに問題があるため、根本的な原因を特定する必要があります。 原因が分かれば、実際に修理ができなくても、ガイドの結果を改善できるかもしれません - しかし、根本的な問題を理解することは重要です。 マウントが何をしているかを理解するために、次の手順を実行します。
1. ガイドスコープの焦点距離とカメラのピクセルサイズが正しいことを確認し、新しいプロファイルウィザードを使用して、テスト用の新しい機器プロファイルを作成します。 ガイドスコープの焦点距離とカメラのピクセルサイズが正しいかどうかを確認してください。
2. マウントにASCOM接続があればそれを使用し、マウントガイド速度を恒星の0.5倍〜1倍に設定します。 マウントに搭載されているバックラッシュ補正を無効にします。
3. 2秒露出で、赤緯=0付近のガイド星をPHD2に自動選択させ、スコープを東西の水平線から45度以上に向け、シーイングの影響を最小限に抑えます。
4. ガイドアシスタントを10~15分ほど実行し、特に最小移動量に関して、ガイドアシスタントの推奨事項を適用します。 赤緯のバックラッシュを測定させます。 この過程でガイド星を見失わないように、大きな追跡領域を使用する必要があるかもしれません。- 追跡範囲内に複数の星がないことを確認してください。 バックラッシュテストでは、星が北に長く移動するので、カメラフレームの南端に近いガイド星を選び、余裕を持たせてください。
5. GA動作中にどのような状況になっているかを見てください。 マウントをぶつけたり、何か本当に異常なことが起きたら、テストを中止し、その後、再開してください。 目的は、正常に動作しているときのパフォーマンスを測定することです。
6. ガイドアシスタントが推奨する以上のガイドパラメータを変更しないでください。
7. ガイドアシスタントの表に表示される結果を注意深く見てください。 テーブルの項目はそれぞれ、マウントのパフォーマンスについて何か役に立つことを教えてくれます。 これらの結果は、ガイドログにも書き込まれるため、後で分析することができます。
8. 手順3でキャリブレーションの警告メッセージが表示された場合は、先に進む前にその問題を解決しておく必要があります。 悪いキャリブレーションでガイドをすると、良い結果が得られない可能性があります。 また、ポーラアライメント誤差が10分角以上ある場合は、それを改善してから上記のステップを繰り返してください。
9. 風やその他の"ミス "による重大なエラーがない限り、PHD2をさらに10~15分ほどガイドさせる。 この間、ガイドのパラメータは一切変更しないでください。
自分で結果を解析される場合は、PHDログビューアツールやチュートリアル PHD2ガイド結果の分析 をご利用ください。また、PHD2ベストプラクティス(最善の方法)に関する文書も参照されたい。 これらの文献はすべて、OpenPHDGuiding.orgのWebサイトの News タブで閲覧できます。もし、結果を理解するのに手助けが必要な場合は、OpenPHD2 Googleフォーラムにガイドとデバッグログファイルの両方を投稿してください。
失われた星
PHD2がカメラフレーム内の主ガイド星を見つけられないとき、いくつかのことが起こります。
1. 画面が点滅し、「ピッ」という音が鳴ります。 音は必要に応じて無効にすることができます(詳細設定/ガイドタブ)が、画面は常に点滅しています
2. ガイドコマンドは発せられず、次のガイドカメラの露出が開始されます
3. PHD2に接続されている画像処理アプリケーションに失われた星の現象のメッセージが送信されます。
4. 失われた星のメッセージは、低SNR、低HFD、低質量、質量変化などの理由を含めてステータスバーに表示されます。
失われた星の現象は、探索領域内の天体がもはや星として識別される基準を満たさない場合に起こります。 これは、SNRや全光度(質量)が低すぎて、十分な明るさが得られなくなることを意味します。あるいは、カメラのセンサーノイズのように見えすぎて、そのサイズ(HFD)が最小半光束直径の設定値よりも低くなっている可能性があります。検索領域内の複数の類似した星を識別する方法として「ガイド星の明るさ・サイズ検出」を使用している場合、星の質量値が許容量以上変化した場合、失われた星の現象が引き起こされることになります。この機能は通常、現在のバージョンの PHD2 には不要であり、無効にすることができます。 いずれにせよ、トラブルシューティングの最初のステップは、失われた星の現象の理由と、それが空の状態の悪化、機械的な追跡エラー、または不適切な星の選択パラメータが原因で発生したかどうかを理解することです. 初心者にとって、失われた星の現象の一般的な原因は、ガイドカメラの焦点が合っていないことです。星のプロファイルツール の章で説明されている手順を使用して、ガイドカメラの焦点が合っていることを確認する必要があります。
PHD2は、拡張ガイド星の回復プロセスのようなものを呼び出すものではありません - 単純に露出を続け、ガイド星が現在の検索領域内に再び現れるかどうかを確認するだけです。 これは、雲、突風、または散発的な機械的問題などの短時間または断続的な問題には適していますが、マウントの追跡精度がガイド星を検索領域内に妥当な時間維持するのに十分であることを前提としています。 失われた星の現象の経過時間が長くなるにつれて、マウントはゆっくりと目標から外れてドリフトし、かなり後で検索領域に再び現れる星はおそらく別の星です. この場合、PHD2 はガイドを再開しますが、元の天体目標は中心から外れ、視野に入らない場合もあります。 長期間の星の失われた期間からの回復は、PHD2 ではなく、エンドユーザーまたは撮影自動化アプリケーションの責任です。 復元を適切に行うには、スコープを元の空のポインティング位置に再度回転させる必要があります。これは、PHD2 にはこの手順は備わっていません。
アラートメッセージ
PHD2は、メイン画面の上部にアラートメッセージを表示することがあります。 これらは一般に、注意を要するエラーまたは診断情報を示しています。 通常の操作では、これらのメッセージは表示されませんが、もし表示された場合は、この項で対処方法を決定することができます。
ダークライブラリと不良ピクセルマップのアラート
ダークライブラリまたは不良ピクセルマップを使用する - ダークライブラリまたは不良ピクセルマップを使用すると、PHD2がホットピクセルやその他のセンサーノイズを星と誤認する可能性を低減できます。 このメッセージを無視すると、PHD2が不注意にガイド星からホットピクセルに切り替えてしまい、正しくガイドできなくなる事態が発生する可能性があります。
フォーマット / 形状の不一致 - ダークフレームと不良ピクセルマップは、使用するカメラのセンサーのフォーマットと一致している必要があります。 既存のプロファイルでカメラを変更した場合、既存のダーク/bpmファイルは使用できなくなり、この警告メッセージが表示されます。このメッセージを表示させないためには、カメラを変えたときに新しいプロファイルを作成する必要があります。新しいダークやBPMを撮影する必要はありますが、元のカメラで使用するために古いファイルを保持することができます。また、PHD2を間違ったカメラに接続した場合、フォーマット非互換の警告メッセージが表示されることがあります。これは、ガイドカメラとイメージングカメラが同じメーカーのものである場合に特に危険です。ガイドに使用するカメラは、接続ダイアログでガイドに使用するカメラを完全に指定することができます。 同じタイプの複数のカメラ 間違ったカメラに接続されていない限り、ダークライブラリや不良ピクセルマップを最初から作り直す必要があります - 詳細はこちらでご確認ください。ダークフレームと不良ピクセルマップ
ASCOMアラート
マウント、カメラ、その他のASCOM制御デバイスに初めて接続したとき、必要な機能がドライバによってサポートされていないという警告メッセージが表示されることがあります。 例えば、 ASCOMの望遠鏡/マウントドライバがパルスガイドをサポートしていない場合、古いドライバで発生する可能性があります。 このような状況では、ASCOMのドライバをアップデートすることが唯一の手段です。 これらのドライバは、一般的にASCOMのウェブサイトから入手可能で、場合によっては機器メーカーから入手することもできます。 すでに修正された問題に遭遇しないように、これらのドライバの最新版を使用することが原則です。
また、マウント用のASCOMドライバに関連する他のアラートメッセージが表示される場合があります。
1. 「マウントするパルスガイドコマンドに失敗しました - ガイドは無効になる可能性があります。」 これは通常、ASCOMマウントドライバのバグやタイミングに敏感であることが原因で、ガイドコマンドが正しく実行されたかどうかを知る方法は一般的にありません。アラートが表示されることがほとんどなく、ガイド結果に問題がない場合は、無視しても問題ないでしょう。 アラート状態であっても、PHD2はガイドコマンドを発行し続けるので、すぐに対処する必要はありません。もし、アラートが頻繁に表示される場合は、デバッグログを弊社に送っていただければ、ASCOMドライバの作者に問題を伝えるお手伝いをいたします。
2. 「ガイドが停止し、スコープが旋回を開始しました」これはかなり自明なことですが、スコープが旋回したという判断は、ASCOMのマウントドライバからPHD2に報告されたものです。 実際に旋回したかどうかは、PHD2にはわかりません。 ガイドが有効な状態で誤ってスコープを旋回させたのではないと仮定すると、おそらくドライバのタイミングに問題があると思われます。詳細設定ダイアログの「ガイド」タブで、「マウントが旋回したらガイド停止」というボックスのチェックを外すと、一時的にこの問題を回避することができます。これにより、ガイドを続けることができますが、結果は疑わしいかもしれません。 デバッグログには、ASCOMドライバの作者に問題を説明するのに必要な詳細が記載されているはずです。
3. 「マウントが無効なガイド速度を報告しています。」 一部の新しいドライバーは標準に従わず、度/秒の正しい単位を使用していないため、意味のないガイド速度を報告します。これが発生すると、PHD2 は報告されたガイド速度を ”不明” として扱い、それらを無視します。 これにより、PHD2 PPEC ガイドアルゴリズムの精度が低下し、キャリブレーションレビューやその他の診断ツールの有効性が低下します。 これは PHD2 の問題ではありません。ドライバの作成者が修正する必要があります。
カメラタイムアウトのアラート
カメラのタイミングやタイムアウトの問題に関連するアラートメッセージについては、前述のとおりです: カメラのタイムアウト
キャリブレーションアラート
マウントキャリブレーション処理中に、さまざまな警告が表示されることがあります。 ここでは、これらについて説明します: キャリブレーションチェックとアラート
最大持続時間制限のアラート
通常のガイド時に、「赤経または赤緯の最大持続時間制限の設定が、PHD2がガイド星をロックし続けることを妨げている」という警告メッセージが表示されることがあります。これらのパラメータを既定値から減少させた場合は、元に戻す必要があります。ただし、1秒を大きく超えている場合は、機械的な問題が発生している可能性があり、それを修正する必要があることを示している。最も単純なケースでは、ケーブルの引っ掛かり、突風、マウントの衝突などの外的要因で、ガイド星が大きく移動してしまったことが考えられます。そのような場合は、可能であれば問題を修正してガイドを進めるだけで良いです。 しかし、それ以外のケースでは、ガイド星のズレが着実に大きくなっているにもかかわらず、まったく修正されていないことがアラートの引き金になっていることがあります。例えば、PHD2がマウントを南北どちらにも正しく動かせない場合、未修正の累積誤差がやがてアラートの引き金となるポイントに到達します。または、「子午線を超えたら赤緯出力を逆転する」(詳細設定/ガイドタブ)の設定が正しくないために、赤緯ガイドが ”暴走”している可能性があります。このような問題は、診断が必要であり、単に最大持続時間の制限を増やすだけでは解決しません。
画面表示の問題
新規ユーザーから、メイン画面に表示される画像が極端にノイズが多い、ほとんど白一色や黒一色であるとの苦情がよく寄せられます。カメラが機能していて、実際に画像をダウンロードしていると仮定すると、表示の問題は、フレーム内に使用可能な星がないことが原因であることがよくあります。 たとえば、屋内または昼間にカメラをテストしようとすると、ほとんどの場合このような状態になります。このような状況での画像表示窓の出現は、有益な情報を提供しないため、割り引いて考える必要があります。 PHD2は、夜空の下で本物の星を見ることを目的とした自動画面伸縮機能を採用しています。星が存在しない場合、画面はフレーム内にあるものの最小から最大までの輝度値の範囲を表示するように引き伸ばされます。 これが、ノイズの多い、白一色、黒一色の表示結果を引き起こす原因となっています。また、ガイダーのピント合わせがうまくいかないと、画面の不具合が発生することがあります。 ガイダーのピント合わせは面倒な作業ですが、良いガイド結果を得るためには重要です。 良いテクニックは、まず明るくても飽和していない星から始め、その星で焦点を合わせるようにすることです。 その後、徐々に暗い星に移動し、PHD2星のプロファイルツールでガイド星の大きさを測りながら、ピント位置を微調整します。 バーティノフのフォーカスマスクや、他の用途のフォーカスツールを使っても良い結果が得られます。 何を使ってもいいわけではありませんが、画面を見てピントを判断しようとするだけでは、いい結果は得られないと思います。
ホットピクセルと星の選択の問題
ほとんどのガイドカメラで、ホットピクセルの集まりがPHD2によってガイド星と誤認される問題が発生することがあります。 これは、自動化ツールを使用していて、「自動選択」されたガイド星が誤ってホットピクセルを選択してしまう場合に特に問題になることがあります。多くのカメラでは、単純なダークフレームでホットピクセルの問題を軽減または除去することができます。ダークフレームは常に出発点として使用する必要があります。しかし、それ以外のカメラでは、不良ピクセルマップを作成し、不良ピクセルの位置やサイズに変化が見られたら、随時更新する必要があります。 カメラのセンサーは経年変化や温度変化に反応することもあるので、不良ピクセルマップのメンテナンスは小さな作業ですが、積極的に行いたいものです。手順については、本書の 不良ピクセルマップ(欠陥マップ) の項に記載されています。この問題は、宇宙線がセンサーに衝突することで発生する一過性のホットピクセルとは異なります。 宇宙線の衝突はガイドを混乱させますが、どうしようもないことなのです。
PHD2にガイド星を選択させる「自動選択」ことが推奨されているので、利用可能なUIコントロールを使用して、PHD2が可能な限り最高の仕事をするのを助ける必要があります。詳細設定ダイアログのガイドタブにある 「最小半光束直径(HFD)」プロパティは、ホットピクセル選択を避けるための最も効果的なツールでしょう。この値は、あなたのセットアップで作成できる最も小さく、最も暗い実際の星を使用できるように設定する必要があります。 星のプロファイルツールを使って、システムに適したガイド星のサンプルを測定する必要があります。 そして、これらの星を受け入れ、実際にはセンサーの欠陥である小さな明るいスポットを拒否するように最小半光束直径(HFD)の値を設定します。もう一方は、システムが提供する最も明るいピクセル値(飽和を表すADU値)も指定する必要があります。こうすることで、PHD2が、プロファイルは平坦だが実際には飽和していない星を拒絶するのを防ぐことができます。彩度コントロールは、「詳細設定」ダイアログの「カメラ」タブにあり、「星の飽和検出」というラベルの付いたコントロールグループの一部です。「ADU値最大による飽和状態」のオプションを選択し、お使いのシステムの値を設定します。8ビットカメラであれば彩度は255程度、16ビットカメラであれば65000ADU程度が彩度となります。正しい値がわからない場合は、スコープを明るい星に向け、数秒のガイドカメラ露出を使用して、星のプロファイル画面をもう一度見てください。この画面に表示されるのが「ピーク値」で、これは最も明るいピクセルのADU値で、画像が8ビットか16ビットかがわかります。 この2つのコントロールは、PHD2ガイド星の選択において、より良い結果をもたらすと思われます。
作業ベースラインの復元
アドバイスがあったにもかかわらず、何も知らずにガイドのパラメータを変更した結果、パフォーマンスが変わらなかったり、逆に悪化してしまったりすることがあります。 先に進む前に、設定を既定の値に戻す必要があります。 プロファイルの作成に新しいプロファイルウィザードを使用した場合、パラメータは設定の詳細に基づいて設定されており、かなり近い値になる可能性があります。 もし、そのような設定を使用して重大なガイドの問題が発生した場合、おそらくマウントやその他のハードウェアに問題があると思われます。設定を既定の値に戻すにはいくつかの方法があります。
1. 詳細設定ダイアログの「アルゴリズム」タブでは、各フィールドのツールチップを見ることで、パラメータを個別にリセットすることができます。マウスカーソルをフィールドに合わせると、既定値が表示されます。ただし、最小移動量の設定は、画像の大きさに依存するため、正確ではありません。この方法は、いくつかの設定だけを復元したい場合に最適です。
2. 選択した赤経および赤緯ガイドのアルゴリズムについて、「アルゴリズム」タブの 「リセット」 ボタンをクリックします。これは、すべてのガイドパラメータをリセットするために推奨される方法です。 最小移動量の設定は、新しいプロファイルウィザードで最初に計算された値にリセットされます。 その後、ガイドアシスタントを実行してこれらの設定を調整した場合、その処理を繰り返す必要があります。
3. 「機器と接続」ダイアログの「プロファイル管理」ボタンをクリックして、新規プロファイルウィザードを実行します。すでに持っているのと同じカメラとマウントの選択肢を使用し、プロファイルに新しい名前を付けます。旧プロファイルのダークライブラリと不良ピクセルマップを再利用したい場合は、新しいプロファイルに接続し、「ダーク」メニューを使って旧プロファイルからそれらのファイルをインポートします。新しいプロファイルの設定に満足したら、古いプロファイルを削除することができます。
ガイド性能の低下
一旦、すべてを稼働させれば、おそらくほとんどすぐにそれなりのガイド結果を得ることができるでしょう。何をもって”十分“とするのか、その基準は人それぞれでしょう。しかし、星が筋状になったり、細長くなったりして、撮像結果に納得がいかない場合は、体系的に修正する必要があります。そのため、ガイドのパラメータをやみくもに調整し、より良い状態を目指したくなることがあります。パラメータを調整することは悪いことではありませんが、パラメータが何をするのか、どんな問題を解決しようとしているのかを理解した上で、慎重に行う必要があります。PHD2の初期設定は、ほとんどのアマチュア機器と場所で妥当な結果が得られるように慎重に選択されています。最適な設定は、画像調整、シーイング条件、マウントの挙動によって異なります。言い換えれば、それらはあなたの状況に固有のものです、正しいガイドパラメータの魔法の “赤い本”はなく、他のユーザーから取得した設定はあなたの状況とはまったく無関係かもしれません。新規プロファイルウィザードを使用して開始した場合、既定の設定はすでに画像のサイズに合うようにかなり調整されているはずです。ガイドアシスタントを使えば、シーイングの状況や、シーイングを追いかけないための最小移動量の調整方法など、より具体的な状況を知ることができるのです。また、ガイドアシスタントや 手動ガイドのツールを使って、マウントのバックラッシュを確認することができます。これは、赤緯ガイドの結果を理解するために重要なことです。
ログ解析
問題の切り分けや調整には、必ず PHD2 ログファイルを使用する必要があります。 どちらも人間の読者が簡単に解釈できるようにフォーマットされており、ガイドログは他のアプリケーションに簡単にインポートできるように構成されています。「ツール」の項で述べたように、PHDログビューアやExcelなどのアプリケーションを使用することで、全体の性能を視覚化したり、性能の統計を計算したり、ガイドに問題があった時間帯を調べたりすることができます。Excelなどでは、ガイドログの列の区切りにカンマを使うように指定するだけです。とはいえ、ログ解析にはPHDログビューアが強く推奨されており、開発者がPHD2のGoogleフォーラムでサポートを提供する際に使用するツールです。
ガイドログの内容
ガイドログの内容は、新しい機能が追加されるにつれて進化し続けるでしょう。 しかし、基本的な内容は安定しており、それを解析するアプリケーションを壊さないようにかなりの注意が払われています。 ログを自分で解析したい場合は、以下の情報が役に立ちます。
PHD2 ガイドログには、0 個以上のキャリブレーション順序と 0 個以上のガイド順序が含まれます。 これらの各項目には、使用されているガイドアルゴリズムとガイド用に PHD2 によって使用される内部パラメータに関するほとんどの情報を提供するヘッダーがあります。 キャリブレーション実行またはガイド順序の開始時に、ヘッダー情報の最後の行で一連の列見出しが定義されます。 これらの列の意味を以下に示します。
キャリブレーション列
l dx、dy は、カメラ座標系でのピクセル単位の開始位置からのオフセットです。
l x、y は、各キャリブレーションステップの終了時のガイド星のカメラ x/y 座標です。
l Dist は、カメラ座標系で移動した合計距離です (dist = sqrt(dx*dx + dy*dy))。PHD2がキャリブレーションパラメータを計算する際に使用する値です。
ガイド列
l dx, dy はキャリブレーションと同じです - カメラ座標系におけるガイド星の "ロック位置 "からのオフセット量
l RARawDistanceおよびDECRawDistance - これらは、dxとdyをマウント座標に変換したものです - つまり、ガイドカメラの任意の角度を使用して、カメラの X/Y からマウントの 赤経/赤緯 にマッピングします。
l RAGuideDistance および DECGuideDistance - これらは、様々なガイドアルゴリズムからの出力です。ガイドアルゴリズムは、”生の”距離を操作して、望遠鏡の位置を各軸で調整する場合、どの程度調整すべきかを決定します。たとえば、「最小移動」パラメータ セットを使用すると、”生の”距離がゼロでない場合でも、ガイド距離がゼロになることがあります。
l RADuration, RADirection, DECDuration, DECDirection - これらは、上記の2つのガイド距離によって決定される値です。「duration(持続時間)」は、RAGuideDistanceとDECGuideDistanceで指定された距離だけマウントを動かすのに必要なガイドパルスの長さ(ミリ秒)です。
l XStep, YStep - 適応光学装置が使用されている場合のステップ調整時間
l StarMass - ガイド星の画像の明るさ指標
l SNR - PHD2で使用される内部的な「星検出率」- 基本的に、星が空の背景からどれだけ識別できるかを示す指標です。
l ErrorCode - ガイド星の測定の品質を表す整数値
○ 0 = エラーなし
○ 1 = 星が飽和状態
○ 2 = 星はSNRが低い
○ 3 = 星の質量が小さすぎて、正確な測定ができない
○ 4 = 星がフレームの端に寄ってしまっている
○ 5 = 星の質量が規定値以上に変化している
○ 6 = 予期しないエラー
すべての距離値はピクセル単位です。 ガイド欄のヘッダーには、PHD2が認識している画像サイズが表示され、必要に応じてピクセル距離値を秒角単位に調整するために使用することができます。
問題の報告
PHD2特有のアプリケーションの問題が発生した場合は、open-phd-guiding Googleグループに報告することが推奨されます。
https://groups.google.com/forum/?fromgroups=#!forum/open-phd-guiding
まずグループのメンバーシップを確立する必要があります。もちろん、より多くの情報をご提供いただけると、問題を解決できる可能性が高まります。 以下のガイドラインは、その点で役に立ちます。
1. 問題を再現してみる - 手順が明確であれば、解決策を素早く見つけられる可能性が高くなります。再現できる場合は、最小限の手順に減らしてみてください。 私たちが自分で再現しようとするとき、あなたのハードウェアやコンピュータ環境はありません。
2. オペレーティングシステム、機器の種類、PHD2 のバージョンなど、構成について完全に説明するようにしてください。
3. 問題が発生した時のPHD2ログファイルをアップロードする - これは重要なステップです。 「ヘルプ」メニューの「ログファイルのアップロード」機能を使ってください。関連するログファイルを簡単に選択でき、ファイルサイズを制限することなくサーバーにアップロードできます。フォーラムのメッセージにログファイルを添付することは推奨されませんし、ファイルサイズの関係でまったく機能しないこともよくあります。 問題が再現できない場合、最初にその問題が発生した時間帯を推定してみてください。何百行もの出力に目を通すことなく、デバッグログから証拠を見つけることができます。 ログファイルをアップロードせずにフォーラムでヘルプを要求すると、通常そのように要求されるため、ヘルプを得るのに不必要な遅れが生じます。