補足説明
天体観測とガイド
天文学的なシーイングを理解することなく、イメージングやガイドの道を歩むことは難しいです。これは複雑なテーマであるため、ここでは最低限のことだけを説明します。 “シーイング” とは、望遠鏡を通して見る (または写真を撮る) 星の位置のずれや突然の明るさの変化に付けられる用語です。私たちの目は星の小さな位置の動きを解像できないため、肉眼ではこれを “きらめき”として見ます。これは大気の乱れであり、地球大気のさまざまなレベルにある熱細胞の移動によって引き起こされます。光はそれぞれの大気細胞を通過するときに屈折するので、星を見るときは、小さなレンズの列のように振る舞う空気の列を通して見上げていることになる。 各細胞による光の屈折はその温度に依存し、一般的に細胞は異なる温度を持っています。大気は非常にダイナミックなので、これらの要素はすべて様々な速度で動き回り、あなたが見ている空気の柱に入ったり出たりしているのです。 特に焦点距離が長い場合、この大気の動きが、正しく動作するマウントで見られるガイド星の動きの最大の原因であり、「ガイドアウト」することはできません。大気中の細胞が動くということは、ガイド星の位置が1秒間に10数回から1000数十回変化するということであり、アマチュア向けの機器では、たとえ適応光学機器であっても、それを補正するのに十分な速さで反応することはできません。プロの天文台は、非常に高価な測定装置、人工星、およびミラーを変形させて画像を非常に高い周波数でシフトできるメカニズムを採用することで、これを大部分行うことができます。 これらの観測所では、シーイング障害のほとんどは大気の上層で発生し、それらはモデルのシーイングや予測のほとんどのシーイングに使用される層です。アマチュアの場合、特に都市部や裏庭で撮影する場合、望遠鏡に近い場所からもシーイングの問題が発生することがあります。 硬い地表や近隣の屋根からの熱対流は、低周波の ”沸騰” 現象を引き起こし、ガイド性能と画像性能を低下させます。地上レベルの熱は、望遠鏡のチューブ内に管電流と熱気の不均一な層を作成することもできます。また、日中の気温が高い場所で作業する場合は、日没後、機器の温度が安定するまでに何時間もかかることを想定しておく必要があります。
ガイドの観点から、私たちは常にシーイングの挙動を ”アンダーサンプリング” しています。露出を行い、画像をダウンロードし、ガイド星の位置を計算し、ガイドコマンドを送信するまでに、センサー上の星の位置は、おそらく100回以上移動しているはずです。露出時間が短くなると、これらの測定誤差はさらに大きくなり、「エイリアシング」と呼ばれる現象が発生します。自動車の車輪のように高速で回転するものが登場するテレビ番組や映画を見ると、エイリアシングにさらされます。何年にもわたって、あなたはそれを無視するように仕向けられてきましたが、本当に追跡シーンで車の車輪が逆回転しているのでしょうか? このエイリアシング現象は、フィルム装置の露出速度(例えば60コマ/秒)が、回転する物体の動きを正確に計測するには遅すぎるために起こります。自動ガイドの話に戻りますが、実際のガイド星の位置については、常に古い情報を扱うことになります。また、ガイドコマンドを正確に実行するためのマウントの欠点も考慮に入れていません。ドリフト、周期誤差、大気屈折、機械的たわみなど、補正できる星の動きは、シーイング条件から生まれるノイズの海に隠れています。PHD2 ガイドアルゴリズムの主な目的の 1つは、修正できない追跡エラーを識別して対応することです。 ガイドカメラの露出時間を選択すると、この作業が容易になります。
ガイドカメラで見られる高周波のシーイングによる星の動きは、ガイドの露出時間の長さに強く影響されます。 次のプロットを見ると、露出時間を長くすると、ガイド星の動きの観測範囲が狭くなることがわかります。
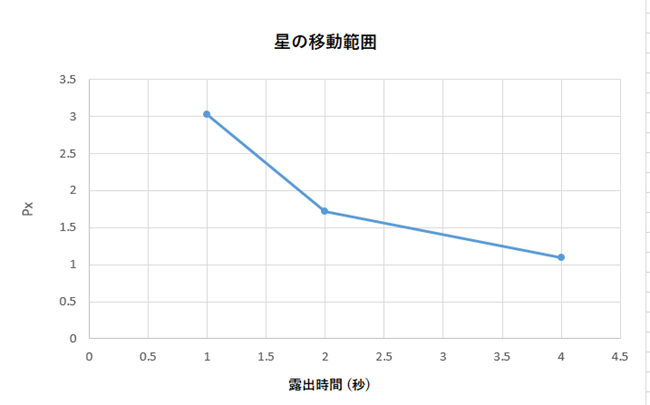
基本的に、カメラセンサーは、変化する星の光パターンを平均化し、その結果を滑らかにしているのです。サンプル不足による測定の不確かさはありますが、露出時間が長いため、PHD2はガイドによって本当に改善できる低い周波数の誤差を分離・特定しやすくなっています。当然ながら、露出時間には実用的な上限があります。 一般的には、マウントが補正を必要とせずに自走できる時間の長さによって制限されることになります。 周期的な誤差、ドリフト、たわみなどによる小さな誤差は、画像を台無しにするほど大きくなる前に修正する必要があります。 適切なバランスを見つけるには、シーイング条件と機器の品質の両方に常に依存します。 PHD2の出発点として、私たちは通常、約2秒の露出時間を使用することをお勧めします。少なくとも0.5秒の露出は、マウントがそれを必要とする場合のみで、複数の星でガイドが有効である場合にのみ使用されます。
ビニングの使用
PHD2で使用できるガイドカメラの多くは、ハードウェアレベルのビニングをサポートしており、長焦点距離でのガイドを行う場合や、非常に小さなピクセルを持つガイドカメラを使用する場合に役立つことがあります。このようなシナリオでは、暗いガイド星を使用しなければならないことが多く、ガイド画像は大幅に過剰サンプルされることがあります。過剰サンプルは実質的なメリットはなく、微光星の円盤形状を多数の小さなピクセルに投影すると、信号対雑音比(SNR)が低くなってしまいます。画像をビニングすることで、カメラの読み取りノイズの影響を軽減し、SNRを向上させることができます。 ビニング係数を1より大きく選択すると、以下のような効果があります。
1. 星の画像はSNRが高くなり、背景のノイズレベルを超えて検出しやすくなります。 特に、暗い星(SNR値が10程度以下)の使用に限定している場合に有効です。
2. カメラからダウンロードされるデータ量は、ビニング係数の2乗で減少します。 これは、USBリソースを多用するカメラを使用している場合、たとえ星の輝度やSNRがビンニングなしの画像ですでに妥当であったとしても、役に立つことがあります。 もちろん、サブフレームを使用しても、星が選択された時点で同じ結果を得ることができます。
3. ガイダー画像の解像度(画像調整)は、ビニング係数によって低下します。 調整前の画像スケールが1秒角/ピクセル以下であれば問題ありませんが、調整前の画像スケールが2.5秒角/ピクセルを超えると、ガイド結果が悪くなる場合があります。 また、メインカメラシステムの画像調整にも依存するため、実験が必要です。
それぞれのビニングレベルには、独自のダークフレームと不良ピクセルマップが必要です。 ビニング設定を柔軟に切り替えたい場合は、ビニング値ごとに別々のプロファイルを作成する必要がある。 そして、それらのプロファイルごとにダークライブラリと不良ピクセルマップを作成する。 ビニング係数を変更したいときは、希望の設定を持つプロファイルに切り替えるだけで、ダークライブラリや不良ピクセルマップが利用できるようになります。 カメラが正しくビニングされているか確認したい場合は、ガイド統計 画面を使ってフレームサイズと現在のカメラ上のビン設定を確認できます。 ビニングを変更することを決定した場合でも、新規プロファイルウィザードを使って新しいプロファイルを作成する必要があります。ガイドの観点からは、ビニングの変更は本質的に別のカメラに切り替えることと同じです。
ディザリング
固定パターンノイズやホットピクセルを低減するために、撮影者は露出の間に望遠鏡を微小に動かすことがありますが、これを「ディザリング」と呼びます。ディザリングは画像処理アプリが制御しており、ポインティングポジションの移動中にメインカメラでの露出を中断できるのは画像処理アプリだけです。 PHD2の役割は、要求された位置の移動を達成するためのガイドコマンドを発行することだけで、言われたことをただこなしているだけです。ポインティングポジションの小さな移動は、PHD2が2つのステップで実現します。
1. 主ガイド星のロック位置を、画像処理アプリが要求する量だけ変更します。
2. 通常のガイド操作を行い、主ガイド星を新しいロック位置に移動させます。
ディザのサイズは、少なくとも間接的には画像処理アプリによって制御されます。 アプリはディザの最大サイズを指定することができ、通常はピクセル単位で指定します。 その場合、PHD2は、ゼロからこの制限値までの間の乱数値の上限として解釈します。 このランダム化処理は、ディザリングが単純な往復パターンに従ったり、フレームが以前いた場所に戻ったりしないことを保証するために行われます。PHD2ディザリングを行うアプリケーションでは、最大量を直接指定することはできません。おそらく、小/中/大のような選択肢に限られ、最大ディザ量は初期値で設定されます。そのため、PHD2には、詳細設定ダイアログの「全体」タブに、ディザ調整パラメータが用意されています。 これは基本的に乗数項であり、可能なディザ量の範囲を調整することができます。 つまり、調整係数1では初期値は全く変化せず、値10では10倍になる、といった具合です。最大量を直接指定できるアプリ (PHD_Dither など) を使用している場合は、ディザスケールを 1.0 に設定しておく必要があります。 それ以外の場合は、小/中/大の選択肢のいずれかで得られるディザリングの全体的な範囲に満足できない場合は、倍率を調整できます。
ガイドが落ち着き、メインカメラで次の露出を開始するタイミングを判断するのは、画像処理アプリに委ねられています。 PHD2は、画像処理アプリの作者がこの作業を簡単に行えるように、設定作業の進行状況を示す測定情報を追加で提供します。 この情報は、画像処理アプリが使用する必要はなく、完全にオプションです。 この情報を利用するために、画像処理アプリは、ディザリングが落ち着いたと判断するために、どの程度の安定性を確認したいかを指定します。 そのためのパラメータとして、3つの整定パラメータがあります。
1. 許容できるガイド星の位置誤差の最大値 - これを位置許容誤差 (PT) と呼びます。
2. ガイド星の位置誤差が位置許容誤差を下回る間に経過しなければならない時間の長さ (ET)と呼びます。
3. ガイドの安定性に関係なく、測定処理が終了してディザが「完了」と宣言されるまでに許容できる最大時間 - タイムアウト時間 (TO)と呼びます。
これを文章で表現すると、ガイド誤差が ET 秒間 <= PT である場合、またはその条件が満たされない場合は TO 秒が経過した後、整定プロセスは完了します。 この評価プロセスが完了すると、PHD2 は画像処理アプリに、解決が完了したことを示すメッセージを送信します。 これはすべて PHD2 のおまけであり、ロック位置が移動した時点から通常のガイドが行われています。
もちろん、これらのパラメータであるPT、ET、TOの指定は自由であり、その値は賢く選択する必要があります。画像処理アプリは、ユーザーインターフェイスでこれらのパラメータをすべて公開していなかったり、異なる名前を付けていたりすることがあります。 低性能なマウントで大量にディザリングしている場合は、落ち着くまで時間がかかると思った方がよいでしょう。PT値が大きすぎたり、ET値が小さすぎたりすると(パラメータが甘すぎると)、画像処理アプリが次の露出を早く開始しすぎて、画像に筋状の星が入る可能性があります。TO値が短すぎる場合も同様の問題が発生する可能性があります。 逆に、PT値が小さすぎたり、ET値が長すぎたりすると(過大な要求パラメータ)、すべてのディザリングでTO秒の遅延が発生し、整定が「失敗」することになります。過去の実績から、使用したいディザリングの大きさで、典型的なシーイング条件下でマウントがどの程度反応するかを確認するのが賢明な方法でしょう。 もし、あなたのマウントが赤緯バックラッシュが大きいなら、赤緯ガイドコマンドの方向を逆にしたとき、ガイドが落ち着くまでどれくらいの時間がかかるかを確認する必要があります。 ETとPTの値は、時間を無駄にしないために少し余裕を持たせた設定で、通常得られるガイド性能を反映させる必要があります。
既定の設定では、マウントは赤経と赤緯で異なるランダムな量だけシフトされることになります。 [スパイラル] モードを選択すると、ガイド星は元のロック位置を中心に最終的にスパイラルパターンを生成するパターンで移動されます。 このモードでは、自動的に赤緯反転の回数が減り、マウントに大きなバックラッシュがある場合に有効な選択となります。このモードでは、ランダム化処理は行われず、各ディザは画像処理アプリで指定されたサイズになります。 また、赤経のみを選択し、赤緯反転を完全に排除することもできますが、撮像カメラに固定パターンノイズが多い場合には、この方法は適していないかもしれません。
マウントにかなりの赤緯バックラッシュがある場合、北または南の赤緯方向にしかガイドができないことがあります。 このモードで動作中にPHD2が赤緯ディザーのコマンドを受信すると、ディザーと整定が完了するまで、一時的に赤緯両方向のガイドを許可します。 その後、元の南北方向のみのガイドモードに戻ります。 この動作を望まない場合は、ディザリングを 「赤経のみ」 に制限する必要があります。 PHD2のディザコントロールはすべて、詳細設定ダイアログの「全体」タブに含まれています。
マウントの一般的な問題
赤経の周期的エラー (PE)
周期的なエラーは、赤経の様々な部品における非常に小さな機械加工誤差によって引き起こされることがほとんどです。 典型的なドライブシステムの一部分をここに示します。
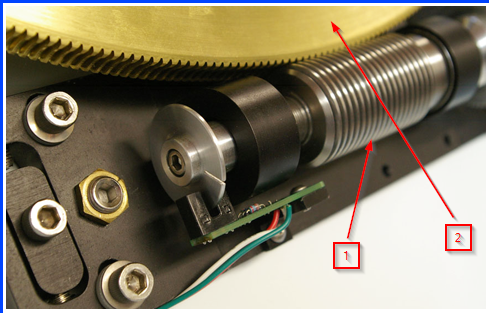
出典:Mathis Instruments
高精度のウォームギア(矢印1)は、より大きなウォームホイール(矢印2)を駆動するために使用されます。 後者は赤経の軸に取り付けられており、恒星数で追尾する場合、ウォームホイールは1恒星日(23.934時間)で1回転します。 この追尾が完璧であるためには、以下の条件がすべて満たされる必要があります。
l ウォームギヤのすべてのねじのピッチと間隔が同一であること。
l ウォームギヤを取付板に強固に固定し、ギヤや取付ブロックにたわみや動きを与えない。
l ウォームホイールのすべての歯の形と間隔が同一であること。
l ウォームホイールは完全に丸く、回転軸の中心に完全に配置されていること。
これは必要な条件のほんの一部ですが、このレベルの精度がほとんどのアマチュアマウントに存在しないことは明らかです。 ウォームギヤの加工が最大の難関で、追跡エラーはそこに起因することが多い。 ウォームギアは恒星追跡中に一定の速度で回転し、1回転するのにかかる時間を「ウォーム周期」と呼びます。ウォーム周期はマウントによって異なりますが、一般的には4~10分程度と言われています。 そのため、ウォームネジの加工精度が悪いと、1ウォーム周期に1回、その存在感を示すことになります。もちろん、ウォームギヤのネジ山の多くにも加工精度があり、それぞれウォーム期間中に1回、追跡エラーに寄与することになります。 この追跡エラーを1つのウォーム周期でグラフ化すると、通常はほぼ正弦波状に傾き、山や谷が変化する曲線になります - これが周期誤差と呼ばれるものです。以下はその例です。
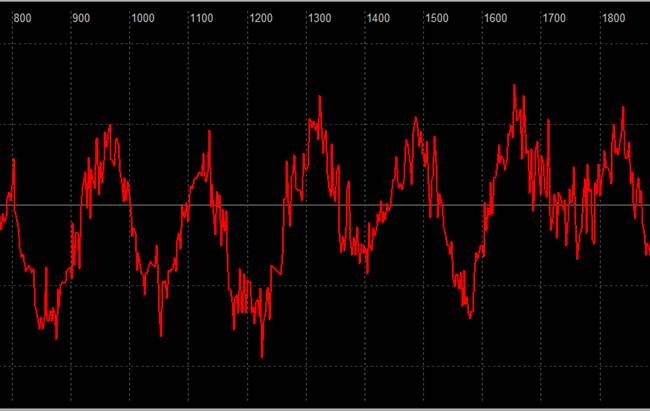
機械的な周期誤差に含まれないシーイングによる高周波の動きに注目してください。
赤経には他にも歯車があり、多くの場合、モーターとウォームギヤの間にある一連の歯車があります。 これらは、モーターの本来の回転速度からウォームギアの遅い回転速度への変換と、ウォームギアの駆動に必要なトルクを発生させるために必要です。 これらの部品にはそれぞれ加工精度があり、マウントの累積追跡エラーの原因となります。 また、これらの部品の多くは、ウォーム周期よりも短い周期で誤差を発生させます。 上流側のギアの不正確さを回避するために、駆動ベルトを使用するマウントもありますが、ベルトの張り方が間違っていたり、スピンドル上でベルトが横方向に動いたりと、それ自体で誤差が発生することがあります。
赤経のエラー補正
マウントファームウェアのPEC( Periodic Error Correction = 周期的なエラー補正 )は、その機能が正しく実装されていれば、自動ガイドに有利です。残念ながら、これは常に当てはまるとは限りません。 しかし、正しく行われた場合、周期的なエラー修正は、ガイドカメラの画像に表示される前に、いくつかの追跡エラーを処理します。 これらの修正は、マウントの PE モデルに基づく予測的なものであり、通常の自動ガイドのように反応するものではありません。 最終的な結果として、PHD2 が赤経軸を目標どおりに維持するために行う作業が少なくなります。 マウントへの実装がうまくできたとしても、目的に特化したアプリケーションを使用して、高品質の PEC 曲線を慎重に計算する必要があります。 測定処理中、アプリはシーイングに起因するガイド星の動きを除外して、複数のワーム期間にわたるサンプルを表す滑らかな補正曲線を生成する必要があります。 また、高調波である追跡エラー (つまり、ウォーム周波数の整数倍の周波数のエラー) のみに補正を適用するために、マウントドライブシステムのウォーム周期とさまざまな高調波を認識する必要があります。 PE 補正曲線が不十分に構築されている場合、赤経追跡は、PEC をまったく使用しない場合よりも悪化する可能性があります。
PECがお使いのマウントで利用できない場合や、実装が悪い場合は、PHD2のPPECガイドアルゴリズムを利用することができます。PHD2 PEC予測ガイドアルゴリズム(PPEC)
バックラッシュは、軸の運動方向が逆になることで発生することがあります。モーターが回転しているにもかかわらず、望遠鏡がすぐに逆方向に動き出さないことがあります。その原因は、駆動系のギアの噛み合わせが緩んでいることがほとんどです。 自動ガイドの場合、赤経のドライブシステムは空を追跡しながら軸を西に動かし続けているので、この問題は赤経のガイドには影響しません。 しかし、経緯台軸はガイド中はほとんどアイドル状態であり、スコープを北または南に移動させるガイドコマンドに応答して短時間だけ動作するため、この問題は経緯台ではよくあるトラブルの原因となっています。 バックラッシュの原因を簡単に説明すると、次のようになります。
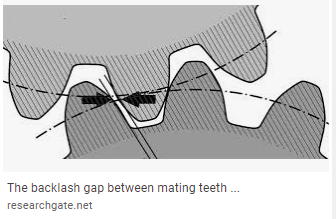
この図は2つの平歯車を示していますが、基本原理はウォームギアとウォームホイールのペアにも適用されます。 上図において、一番下の歯車を現在反時計回りに回転している駆動歯車とします。 ドライブギヤの歯は、その上のドリブンギヤの歯と接触しており、ドリブンギヤは時計回りに駆動されています。 しかし、矢印で示すように、ドライブギヤの歯の後縁の表面は、ドリブンギヤの一致する歯に接触しておらず、わずかな隙間があることがわかります。 そのため、ドライブギヤの向きが逆転すると、ギヤが完全に噛み合ってドリブンギヤが反対方向に回転し始めるまでの短い時間が発生します。 この場合の ”逆転遅れ” は、単純なバックラッシュによるものです。 一般に、歯車装置の結合を避け、潤滑油や熱膨張のためのスペースを確保するために、ある程度の隙間が必要です。 メッシュがきつすぎると、軸はスティクション(静止摩擦)を起こすことがあります。スティクションとは、軸がスムーズかつ自由に動かない、または静止状態から動き出すのが難しい状態のことです。赤緯軸の静止摩擦は、バックラッシュのような反転遅れと、動き出した後の大きなオーバーシュートというパターンになることがあります。 マウントソフトウェアで誤ってバックラッシュ補正を有効にしてしまった場合以外では、静止摩擦は赤緯ガイドの振動を引き起こす最も一般的な原因です。
ガイドアシスタントは、赤緯軸が強制的に方向を反転させられたときの動作を測定します。 ただし、反転遅れ(方向を変えて軸が期待通りの速度で回転するのにかかる時間)を測定することができます。 問題がバックラッシュなのか、静止摩擦なのか、あるいはその両方なのかを区別することは常に可能ではありませんが、GAが生成するグラフが手がかりになることがあります。 この動作は、GAが使用する大きなガイドパルスを使用しない通常のガイド動作でも見られることがあります。反転遅延が大きい場合、例えば3秒以上であれば、赤緯ドライブシステムを調整するのがベストでしょう。 それ以下の遅延であれば、PHD2の「バックラッシュ補正」機能で十分対応できると思われます。 なお、遅延量はマウントのガイドスピードに反比例し、ガイドスピードが上がると反転遅延量は減少します。 これは、ガイド速度が少なくとも恒星数の0.5倍を使用することを推奨する理由の1つです。
反転遅延は、通常、マウントの定数値ではありません。 むしろ、スコープのポインティングポジションや赤緯軸上のスコープのバランスに依存することが多いのです。 マウントが古くなると歯車が摩耗し、赤緯については、スコープが撮像中に最も長い時間を過ごす場所で摩耗が最大となります。 北半球の観測者にとっては、それはおそらく赤緯軸の0度から40度の範囲にあるのでしょう。 特に古いマウントでは、このようなポインティングポジションと、極に近い地域とでは、反転の遅れがかなり異なることがあります。 これも、マウントコントローラにプログラムされた固定サイズの補正よりも、PHD2のバックラッシュ補正機能が優れている一つの理由です。
単一方向赤緯ガイド
上述したように、マウントによっては赤緯の反転遅延が大きすぎて、南北両方向のガイドをサポートできない場合があります。 この状況は、PHD2を一方向のみにガイドするように設定することで緩和することができます。 なぜなら、赤緯ガイドは、極のズレや機械的なたわみによる誤差など、ゆっくりとしたドリフトを補正するためだけのものだからです。 皮肉なことに、ドリフト方向を見やすくするため、またシーイングが単一方向ガイドの妨げになる可能性を減らすために、極アライメントを少し調整することをお勧めします。 合理的な範囲であれば、極のズレは通常、ガイド性能を低下させないことを覚えておいてください。 その代わり、極の近くで撮像している場合や、大きなカメラセンサーを使用している場合は、視野回転が発生する可能性があります。 最初のステップとして、単一方向ガイドをセットアップする前に、極から5~10分角以内に極アライメントするのが良いでしょう。 後でいつでも戻って視野の回転をチェックすることができます。 撮像のために予想される最も高い赤緯(おそらく北緯70度)で、メインカメラでサンプル画像を撮るだけです。 そこで視野回転が見られなければ、ポーラーアライメントはそのままでよい。 極角のズレがいくらあっても、赤緯補正の方向は空のどこかで変わります。 (厳密には、空の2点で方向が反転するが、そのうちの1点は通常地平線の下にある)。 反転する空の位置は、極のアライメントがどのようにずれているか、つまり方位角と高度のアライメント誤差の相対的な量によって決まります。 極のアライメント誤差のほとんどが高度にある場合、方向反転の地点は、子午線反転が必要とされる頃、天の子午線付近になるはずです。
単一方向ガイドに設定するには、以下の手順で行います。
1. 良いガイド星がある視野に移動し、ガイドアシスタントを数分間実行します。 ガイドグラフを見て、ガイド星が北に流れているのか南に流れているのかに注目します。 これを見たら、赤緯ガイドモードをリセットして、逆方向の補正を出すようにします。 例えば、星が北に流れている場合は、ガイドモードを「南」に設定します。
2. 赤緯のガイドアルゴリズムに「ローパス2」を使用し、かなり低い積極性係数、例えば50%で始めてみてください。 積極性が高すぎると、補正によって星がロック位置の "反対側 "に移動してしまい、遅いドリフト速度で元に戻るまでその位置に留まることがあります。 このようなオーバーシュートを最小限に抑えるためには、1回の大きな補正よりも、いくつかの小さな補正を行うのがよいでしょう。
3. ガイドグラフを見ながら、補正が正しい方向に出されているか、星が着実に目標から外れていないか確認してください。 数分、数分から数時間かけて、ドリフトの量が減っていることに気づくかもしれません。 これは、赤緯が反転する地点に徐々に近づいていることを意味し、それに合わせて赤緯ガイドのモードを変更する準備をする必要があります。
4. ディザリングを行う場合は、ディザリングパラメータを 「赤経のみ」 に設定し、赤緯ガイドの中断を避けるとよいでしょう。
PHD2サーバーインターフェースでディザリングを行う場合、ディザリングを実行するために、単一方向赤緯ガイドが一時的に「自動」に切り替わります。 このため、設定時間が長くなることがありますが、固定パターンノイズのカメラに必要なディザリングが可能です。設定が完了すると、赤緯ガイドモードは元の設定に戻ります。 これはサーバーインターフェース経由でのみ機能し、「手動ガイド」ツールを使用したディザリングは、この方法では単一方向ガイドを中断することはできません。
高精度マウントと可変遅延ガイド
非常に正確な絶対値エンコーダと詳細なポインティング モデルを備えたマウントでは、多くの場合、ガイドをまったく使用せずに画像撮影が可能になります。 ただし、ガイドの修正を必要とせずにこれを実行できる期間には制限があります。 このシナリオの目標は、エンコーダやポインティングモデルからの入力と競合せず、全体的な結果を改善する「バックアップ」ガイド機構を提供することです。 これを達成するための推奨戦略は次のとおりです。
1. ガイドコマンドの頻度はできるだけ低くしてください。 これらのマウントは、エンコーダや微細なポインティングモデルからの補正で、実際にはかなり ”忙しい”状態になっていることがあります。 ガイドの頻度が低いと、外部からのガイドコマンドによってこれらの機能が不安定になる可能性を最小限に抑えることができます。
2. シーイングを追いかけないように特に注意してください。これは、適度な長さまたは長いガイドカメラの露出を使い、最小移動量を多めに設定することで簡単にできます。
これまでのPHD2では、4~8秒の露出とゼロではない “間欠動作” 遅延を用いることで、このアプローチに近づけることができました。後者は、最後のガイドコマンドの完了から次のガイドカメラの露出開始までの間に一定の遅延を与えるだけです。このアプローチの欠点は、定常状態のガイド以外の操作 (ループ、星の選択、キャリブレーション、ディザリング、設定など) が時間的経過値によって不必要に遅くなることです。 「可変遅延」機能は、ユーザーが 2 つの異なる遅延値を指定できるようにすることで、この問題を解消します。
1. 定常ガイド以外の動作に使用される「短い」遅延時間です。 これはゼロかもしれませんが、少なくともいくつかのマウントでは、エンコーダの補正を終了する時間を確保するためにゼロでないべきです。 1秒を超える値は、おそらく不要です。
2. 定常状態での長時間露出撮影によく見られる、通常のフレーム間ガイドに使用される「長い」遅延を指定します。 カメラの露出時間に加えて、ガイドの「周期」を制御する値です。
例を挙げると、4 秒のカメラ露出、1 秒の「短時間遅延」、および 4 秒の「長時間遅延」を使用できます。 4 秒の露出時間は視覚関連の影響を適切に抑制し、(4+4) 秒の合計により、ほとんどの撮影作業で安定した8 秒のガイド誘導が得られます。 同時に、ディザの設定時間は、カメラの露出間の短い(4+1) 秒の遅延から恩恵を受けます。
たわみ差動
どんな望遠鏡とカメラの組み合わせでも、空の物体を追尾する際に様々なしなりやたわみが生じますが、それは重力と物理学の結果に過ぎません。実際、個々の部品は、その質量や隣接する部品との取り付け方によって、それぞれ独自の挙動を示します。 特に大型のスコープや重量のあるカメラでは、ガイドが数ミクロン単位であることを考えると、そのたわみ量はかなりのものになります。 一般に、このような小さな寸法はあまり馴染みがないので、人間の髪の毛の太さが約50ミクロンで、一般的なガイド補正の約10倍であることを覚えておくとよいでしょう。
撮像スコープと別にガイドスコープを使用する場合、それぞれのユニットが独立して たわみ・移動することを “たわみ差動” と呼びます。PHD2が別個のガイドスコープを使用している場合、ガイドスコープ/カメラの動きだけが見え、補正されるため、撮像スコープ/カメラの差動は見えません。 このため、ガイドの結果は素晴らしいのに、メインカメラで撮影した星が細長くなってしまうという、かなり一般的で不満の残る問題が発生することがあります。
デュアルスコープシステムには必ずある程度の 「たわみ差動」 が存在し、それがどの程度の大きさで、画像を劣化させるほどの大きさかどうかが問題なだけです。焦点距離1800mm以上の撮像スコープでは、メインカメラの露出時間をかなり短くしないと、通常、「たわみ差動」 が問題になります。なぜなら、可動SCTミラー、カメラとフォーカサー間のすべてのコネクタ、フォーカサー自体、システム内のすべての蝶ネジ留め、ガイドスコープのマウントリング配置など、動き回る可能性のある機械的インターフェース位置があまりにも多いため、これを予測する方法がないからです。典型的な解決策は、デュアルスコープのセットアップを排除し、撮像スコープにオフアクシスガイダー(OAG)を使用することです。これにより、PHD2はメインカメラの画像に影響を与える機械的な動きもすべて見ることができるようになります。 初期のOAGは視野が狭く、使えるガイド星を見つけるのが難しかったため、使いにくいことがありました。 しかし、現在のガイドカメラは、大型で高感度なセンサーを搭載しており、こうした問題はほとんど過去のものとなっています。
もし、細長い星が頻繁に出てくるのに、ガイドの結果が赤経と赤緯の両方でほぼ同じ結果であるような場合は、「たわみ差動」を疑うべきでしょう。 通常、簡単なテストによって、このことを確認することができます。 メインカメラを使い、ガイド機能を有効にした状態で、許容範囲内の丸い星が残る最大の露出時間を求めます。 そして、その露出時間で10~20枚の画像を連続して撮影します。その画像セットを表示できるアプリを使って、撮影した順番に画像を点滅させます。 通常、各画像の星は、前の画像に対して一貫してオフセットしており、画像セットを循環させると、星が特定の方向に ”行進”しているように見えるはずです。 また、星の伸びを見るために、最初に整列させることなく、すべての画像を単純に積み重ねることもできます。
適応光学AO装置
一般的に、アマチュアグレードの適応光学(AO)装置は、不完全なガイドを生み出す問題の一部にしか対処できません。 AOは通常、性能の低いマウントの挙動をマスクしたり、少なくとも改善することができます。なぜなら、ガイドの調整のほとんどは、70ポンドの望遠鏡のギアではなく、小さなチップチルト光学素子を動かすことで達成されるからです。 基本的に、マウントが恒星間追跡以上のことを要求されることはほとんどありません。 バックラッシュ、静止摩擦、周期誤差の問題は、AOを使用することでほとんど解消されます。 さらに、AOは本質的にオフアクシスガイダーであるため、たわみ差動の問題も解消されます。 これらの利点は、多くの本格的な撮影者がAOを使用する理由を説明する重要なものです。
AOが排除できないのは、少なくとも通常の条件下ではシーイングによるガイド星の移動です。 高層大気でのシーイングによるガイド星は、少なくとも100s/secの周波数で発生し、通常、そこまで高速に測定できるガイド星を見つけることは現実的ではありません。もし、このような高いレートでAOを実行しようとすると、次の2つの問題が発生します: 1)利用可能なガイド星は、おそらくSNR値が低く、その位置の計算は比例して低下します。2) の場合、たわみを見るサンプルは不足します。後者の場合、「エイリアシング」(折り返し雑音)が発生し、その結果、ガイドコマンドは必ず不正確なものになり、さらに事態を悪化させる可能性が高くなります。このような理由から、AOガイドの使用者は、シーイングを追いかけないように、0.5秒以上の露出時間を使用することをお勧めします。 AOガイドの目的は、追跡精度と応答性において、マウントを実際よりも良く見せることです。 マウントの性能に制限されることなく撮影を行うのであれば、AOはそれほど大きなメリットをもたらすことはないでしょう。
AOガイドでは通常、ガイドコマンドをAOとマウントの両方に指示することがあります。 ガイド補正がチップチルト素子の物理的限界を超えない限り、コマンドはAOにのみ送信されます。この限界に近づくと、「bump」ガイドコマンドをマウントに送信し、主ガイド星をチップチルト素子のより中心的な位置に戻すのを支援します。これは、ポーラアライメントのドリフト、外部問題(例:ケーブルの引っ掛かりなど)に起因する大きなガイド回遊、または大きなディザを修正するために起こる可能性があります。 これらのガイドコマンドをどのようにブレンドするかについては、マニュアルの「詳細設定/その他デバイスタブ」の項で解説しています。AOパラメータ
ログ出力とデバッグ出力
PHD2は、デバッグログとガイドログの2種類のログファイルを自動的に作成します。 どちらも異なる理由で非常に便利です。 ガイドログは、人間の読者または外部アプリケーションのいずれかが容易に解釈できるように意図的にフォーマットされています。例えば、PHDログビューアアプリケーション(PHD2リリースには含まれていません)は、PHD2ガイドログのデータに基づいて、さまざまなグラフや統計要約を作成できます。しかし、ログをExcelなどに簡単に取り込んで、分析したりグラフ化したりすることも可能です。Excelにインポートする場合は、列の区切り文字としてカンマを指定するだけです。 デバッグログには、PHD2内で実行されたすべての記録が残りますので、問題の切り分けに大変役に立ちます。また、(長文ですが)人に優しいテキスト形式を採用しているので、デバッグログを調べて何が起こったかを確認するのは難しくありません。ソフトウェアの問題を報告する必要がある場合は、ほとんどの場合、両方のログファイルを提供するよう求められます。 どちらのログファイルも使用できない場合は、何の助けも得られません。 ログファイルは、PHD2 の実行中に何が行われたか (または行われなかったか) に関係なく、PHD2 の実行時に常に作成されるため、ヘルプの要求をサポートするログファイルが作成されます。
ファイルの保存場所は、「詳細設定」ダイアログの「全体」タブにある「ログファイルの場所」フィールドで制御します。既定では、ログファイルはユーザードキュメント用のOS固有の既定ディレクトリに保存されます。 例えばWindowsの場合、ファイルは「ドキュメント」ディレクトリ内の「PHD2」サブフォルダーに保存されます。これは便利な場所ではないかもしれないので、この編集フィールドを使用して別のフォルダを指定することができます。 ログファイルの過度な蓄積を防ぐため、PHD2は30日以上前のデバッグログと60日以上前のガイドログを自動的に削除しています。 より長い期間ファイルを保持したい場合は、PHD2が使用しない別のフォルダの場所に移動またはコピーする必要があります。
ログの自動アップロード(下記参照)を簡単にするため、ログデータは「撮像日」(現地時間午前9時から24時間)と定義してグループ化しています。つまり、同じ撮像日に実行されたすべてのPHD2が、その撮像日の2つのログファイルにガイドログとデバッグログデータを書き込むことになります。
通常とは異なるケースで、デバッグや問題解決をサポートするためにガイドカメラの画像を撮影する必要がある場合があります。 これは、詳細設定/全体タブのダイアログで 「診断画像ログの有効化」チェックボックスにチェックを入れ、ガイダー画像の保存フィールドのオプションを選択するすることで行うことができます。 画像ファイルは他のログファイルと同じ場所に保存され、最大限の忠実度を得るために「Fits」フォーマットで書き込まれます。 ガイドカメラのフレームを1つだけ撮影したい場合は、ファイル/「画像を保存...」メニュー項目を使用するだけです。
ログファイルの自動アップロード
PHD2の使い方やガイド結果の改善についてお困りの場合は、Open-PHD-Guidingフォーラムに要望を投稿することができます。 (https://groups.google.com/forum/#!forum/open-phd-guiding)
質問には、あなたが話しているガイドに関連するPHDログファイルを添付する必要があります。デバッグログファイルは通常非常に大きいため、添付ファイルとして投稿することはできませんので、以下に説明するアップロードツールを使用してください。ログファイルの編集、切り取ったり、名前を変えたりしないでください。アップロードを簡単にするために、PHD2には関連するログファイルを選択、圧縮し、自動的にアップロードする機能が組み込まれています。その機能は、「ヘルプ」メニューの中にあります。 利用可能なすべてのログファイルを、タイムスタンプと持続時間を含めて表示するダイアログボックスが表示されます。

必要なファイルを選択し、「次へ」をクリックしてアップロード手順を開始するだけです。 ログがあなたの興味のある期間をカバーしていることを確認するために、「日付」列を見ることに注意してください。PHD2は実行するたびにガイドログファイルとデバッグログファイルを作成するため、ログファイルの一部はほとんど空っぽになります - それらのファイルはアップロードしないでください。 アップロードするファイルは、問題があった部分のファイルだけにしてください。 アップロードが完了すると、ファイルへのリンクを表示する別の画面が表示されます。
そのリンクをコピーまたは記録して、フォーラムに投稿する質問に添付する必要があります。ログファイルは、適当な時間が経過すると、サーバー上で自動的に削除されますので、心配する必要はありません。 サポート依頼の際には、何をしていたのか、どのような問題があったのか、また、どのような時間帯に集中していたのかなどを、詳しく書いてください。
機器プロファイルの管理
機器プロファイルは、基本的な使い方 の項で紹介した、「機器と接続」ダイアログの一部として使用されるものです。複数のプロファイルを管理したい場合は、「機器と接続」ダイアログの「プロファイル管理」ボタンを使用する必要があります。このメニューから、新規にプロフィールを作成したり、既存のプロフィールを編集・名前変更・削除したりすることができます。最も重要なオプションであり、最も使用する可能性が高いのは、マニュアルの「基本的な使い方」で説明した「新規ウィザードを使う」を起動することです。機器構成に合わせたPHD2設定を行う機能です。 各プロファイルは、プロファイルが最後に使用された時点で有効であった、ダークおよび不良ピクセルマップファイルを除くすべての設定を保持しています。 既存のプロファイルの設定を編集するには、まず機器プロファイルのドロップダウンリストでそれを選択し、「プロファイル管理」プルダウンにある「設定」をクリックします。 これにより、詳細設定ダイアログが表示され、必要な変更を行うことができます。 PHD2 使用中に設定が変更されると、プロファイルは自動的に更新されることを忘れないでください。最後に、デバッグ、バックアップ、コンピュータ間の交換を目的として、プロファイルをインポートおよびエクスポートすることができます。
AUXマウント接続
ASCOMドライバやINDIドライバを使用してマウントに接続できない場合、「Ask for coordinates ( 座標を尋ねる ) 」という補助マウント接続を使用することで、より良い代替手段を得ることができます。 このオプションを使用すると、ガイドを開始するたびにスコープの位置を入力または確認するよう求められます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

スコープの現在の赤緯値を入力し、スコープの位置を選択すると、PHD2はそのポインティング位置に合わせてキャリブレーションを自動的に調整します。正確でなくても、数度以内の赤緯値であれば大丈夫です。つまり、この値を毎回更新しておけば、異なる目標に旋回しても再キャリブレーションは必要ないのです。例えば、赤緯0付近でキャリブレーションを行い、高赤緯の撮影対象まで旋回したときに、新しい位置値を入力することができます。近い極の位置でキャリブレーションを行うよりも、より良い結果が得られると思われます。 ガイド開始がディザ操作や画像処理アプリケーションからのサーバーコマンドの結果である場合は、このダイアログは表示されません。 キャリブレーション調整が正しく機能するためには、前回のキャリブレーションが正しい位置データで完了している必要があります。
このオプションをドリフトアライメントツールと一緒に使用する場合、ダイアログは少し違って見えます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。

赤経、緯度、経度の追加情報を入力すると、ドリフトアライメントツールは、より正確にマゼンタ色のターゲット円を調整することができます。 そうでない場合は、「調整」段階の間、円はポインティングエラーの上限の推定値のみを表示します。
カメラやマウントの接続に影響を与えることなく、「Ask for coordinates ( 座標を要求 ) 」補助マウントの接続や切断を行うことができます。 そのため、ドリフトアライメントや 撮影目標への初期旋回のためにこのオプションを使用し、その後、繰り返し表示されるダイアログを避けるために、このオプションから切り離すこともできます。 どのように使用するにしても、正しい値を設定する責任があり、大幅に間違った値を設定すると、ガイドの結果が悪くなることを覚えておく必要があります。
カメラシミュレータの詳細設定
デバイスシミュレータは、PHD2の実験や機能に慣れるための便利なツールとして、基本的な使い方 で紹介しました。 有用なシミュレーションを行うためには、カメラの種類として「シミュレータ」、マウントの種類として「On-camera」を選択する必要があることを忘れないでください。 シミュレーションの詳細に興味が湧いてきたら、メイン画面の「カメラ設定」ボタンを使って、シミュレーションのパラメータを調整することができます。
下の画像のコントロールに、マウスカーソルを合わせるとツールチップ(補足説明)が表示します。(除く、ツールチップ表示不可のコントロール)
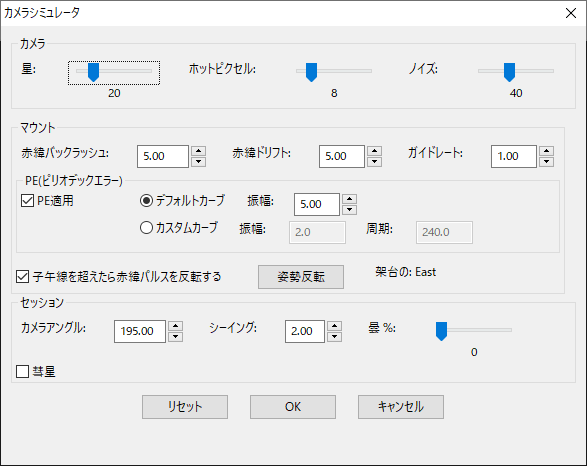
赤緯バックラッシュ、ポーラアライメンのずれによるドリフト、および周期的な誤差について、シミュレートされたマウントの動作を調整できます。また、「シーイング」レベルを調整することもできます。これにより、シーイング効果のように見えるかなり現実的なガイド星のたわみが作成されます。 これらのパラメータを 1 つずつ調整すると、それらが星のたわみにどのように影響し、さまざまなガイドアルゴリズムがそれらの動きにどのように反応するかがわかります。 もちろん、これらのシナリオでは (バックラッシュを除いて) ほぼ完璧なマウントを扱っているため、シミュレーションは完全に現実的ではありません。 シミュレーションダイアログは主に開発目的で使用されるため、ツールチップやドキュメントに対応する変更がなくても UI コントロールが変更される場合があります。
複数プログラムの実行
状況によっては、PHD2 の複数の実例を同時に実行したい場合があります。 PHD2 の 2 番目の実例を開始するには、コマンドラインパラメータに -i 2 を指定する必要があります。 3 番目の実例は -i 3 などで開始されます。Windows でこれを実行するには、Windows の cmd.exe ユーティリティを使用してコマンド ラインから PHD2 を実行します。 または、次の手順で Windows デスクトップショートカットを作成することもできます。
1. デスクトップ上で右クリックする
2. 選択: 新規/ショートカット
3. 次の文字列を入力して、プログラムの場所を特定します:
"C:\Program File (x86)\PHDBuiding2\PHD2.exe" -i2
4. 「次へ」をクリックする
5. ショートカットの名称を入力します(例:PHD2 #2)
6. 「完了」をクリックする
なお、3行目の名前を囲む引用符は、ディレクトリ名に空白が埋め込まれているため、Windowsでは必要です。
PHD2キーボードショートカット
PHD2でよく使うツールや機能の多くに、キーボードショートカットが用意されています。
<ショートカット> < 機能 >
F1 ヘルプ
Ctrl-C 接続機器画面を開く
Shift-Ctrl-C 全ての機器を接続する
Ctrl-L 露出ループ
Alt-S ガイド星の自動選択
Ctrl-G ガイド
Ctrl-S 停止
Ctrl-D アラートを閉じる
Alt-C キャリブレーションの参照
Ctrl-O キャリブレーションをクリア(強制的に再キャリブレーションを行う)
Ctrl-A 詳細設定を開く
B ブックマークの表示/非表示を切り替える
Ctrl-B ブックマークを全て削除する
Shift-B ロック位置のブックマーク
Shift-Ctrl-M 手動キャリブレーションを入力する
Shift-Click 強制的にフルフレーム画像を表示する
ソフトウェア更新
PHD2フォーラムでのサポート依頼に対する最も一般的な回答の1つは、「最新バージョンにアップグレードして、問題がまだ存在するかどうか確認してください」です。もし、あなたが古いバージョンのPHD2で問題を見ているなら、あなたがその問題に遭遇した最初の人ではなく、すでに新しいバージョンのPHD2で発見され、修正されている可能性が高いです。このため、PHD2の開発者は、プログラムの最新バージョンを実行することが重要であると感じています。
無人の画像処理に依存しているプログラムのアップデートは、時に危険な提案とみなされることがあります。PHD2の開発者は、このような気持ちを理解しています。安定したソフトウェアのインストールを維持することと、最新のバグフィックスやその他の改良に対応することの間には、必要な "一得一失" が存在するのです。カメラメーカーは、新しいカメラモデルを導入したことを理由に、ソフトウェアドライバやSDKに画期的な変更を加える場合があります。 この場合、新しいカメラをサポートするためにカメラSDKのアップデートを余儀なくされるため、当社にとって問題となります。 しかし、このことは、現在お使いのカメラとドライバに問題が発生する可能性があることを意味し、最新のカメラドライバとPHD2の最新バージョンにアップグレードすることでしか解決できないことなのです。
PHD2では、この2つの相反するニーズのバランスをとるために、2つのシリーズでソフトウェアをリリースしています。開発版には、最新のバグフィックスと機能向上が含まれており、リリースされる前に開発者によりテストされます。開発リリースを選択したユーザーは、最新のバグフィックスと新機能を得ることができます。開発版には「2.6.3dev6」などの名前がついており、例えば2.6.3メジャーリリースから6番目の開発版であることを示します。
定期的に、開発リリースがより多くのテスト時間を得た後、メジャーリリースとして公開されます。例えば、2.6.3dev6はメジャーリリース2.6.4として発行される可能性があります。
更新の確認
PHD2 には、ソフトウェア更新を自動的にチェックするオプションがあります。 PHD2 のバージョンを最新の状態に保つために、このオプションを有効にすることをお勧めします。 「アップデートを自動的にチェック」オプションが有効になっている場合、PHD2 は PHD2 の起動時にバックグラウンドで更新をチェックします。 新しいアップデートが利用可能な場合、PHD2 は新しいバージョンをインストールするオプションを提供します。 更新の自動チェックを有効にしても、自動操作を含む PHD2 の通常の操作には影響しません。 インターネットに接続していないフィールドで撮影を行う場合は、オプションを有効のままにしておくことも安全です。 PHD2 が更新を確認できない場合、次回起動するまで待ってから再度確認を試みます。
PHD2が起動時に自動的に更新を確認することを許可しているかどうかにかかわらず、ヘルプメニューから「アップデートの確認」をクリックして、常に手動で更新を確認することができます。