トラブルシューティングと分析
キャリブレーションとマウント制御の問題
PHD2の使用を開始したばかりの場合、または初めて新しい機器に接続する場合は、キャリブレーションがうまくいかない可能性があります。 この問題は通常、2つの形式のいずれかであり、それぞれに異なる応答が必要です。
1. キャリブレーション中に星が動くが、「遠すぎる」または「小さすぎる」。新しいプロファイルウィザードを使用し、焦点距離、カメラのピクセルサイズ、マウントガイドの速度設定に正しい値を指定した場合、キャリブレーションで使用される「ステップサイズ」はすでに正しいはずです。ただし、プロファイルを手動で構成した場合や、マウントのガイド速度設定を変更した場合は、[詳細設定]の[ガイド]タブで[キャリブレーションステップサイズ] (calibration step-size)パラメーターを調整する必要があります。このヘルプコンテンツには、このパラメーターの使用方法が記載されており、問題を迅速に解決できるはずです。しかし、新しいプロファイルウィザードを使用していて、「遠すぎる」または「少なすぎる」ガイド星の動きに問題がある場合、問題はおそらく他の場所にあります。
2. RAキャリブレーション、赤緯(「Dec」)バックラッシュのクリア、またはDecキャリブレーション中に、星が十分に移動しません。これらの問題は、表示ウィンドウの上部にある警告メッセージによって通知されます。焦点距離が長くなると、わずかな動きがたわみの結果でさえあり、マウントは実際にはまったく動いていません。この種の問題への対処について、次に説明します。
ほとんどすべての場合、「移動なし」の問題は、マウントまたはケーブルと接続の障害が原因で発生します。このトラブルシューティングに最適なツールは、このヘルプドキュメントの「ツール」セクションで説明されているように、[ツール]メニューの[手動ガイド]オプションです。 「マニュアルガイド」ウィンドウの方向コントロールを使用して、画像表示ウィンドウで星を見ながら、マウントに直接コマンドを送信します。マウントが動いているかどうかをはっきりと確認できるように、少なくとも数秒のかなり大きなガイドパルス量を使用してください。マウントを4方向すべてに動かしてみて、ターゲットの星がほぼ同じ量だけ動いていることを確認します。マウントが応答しない場合は、解決すべきハードウェアまたは接続の問題があることがわかります-PHD2とは関係ありません。靴ひもデバイスを使用してマウントに接続している場合は、そのインジケーターライトを見て、コマンドが到達しているかどうかを確認します。同様に、ST-4互換のガイドカメラには、ガイドコマンドを受信したときにインジケーターライトが表示される場合があります。マウントへのASCOM接続を使用している場合は、COMポートの割り当てが正しいことを確認してください。 ASCOMドライバーがマウントと正しく通信していることを確認するために、POTHなどのASCOM提供のツールを使用することもできます。マウントには最新バージョンのASCOMドライバーを使用することをお勧めします。これらのドライバーの古いバージョンには、パルスガイドに関連するバグがある可能性があるためです。
キャリブレーションの健全性チェックとアラート
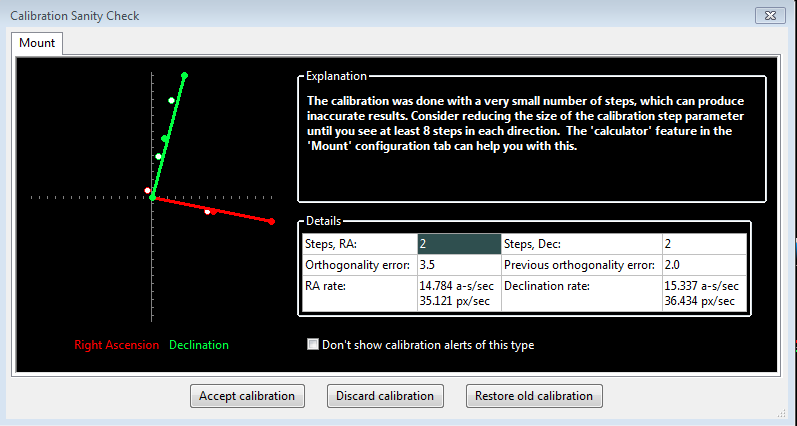
キャリブレーションプロセスが完了する可能性もありますが、PHD2は結果の一部に問題があることを示すキャリブレーションアラートメッセージを投稿します。 これらのメッセージは、キャリブレーションが失敗した、または使用できないことを意味するものではありませんが、一部の結果が正しくないことを警告しています。 このような「健全性チェック」ダイアログには、問題の説明と校正結果の詳細が表示されます。
現在、キャリブレーションの一部としてPHD2によってチェックされる5つの事項があります。
● 手順が少なすぎる(上記を参照)-この問題の解決は、マウントが実際に正しく機能していると想定すると簡単です。西と北の両方のキャリブレーションで少なくとも8ステップが得られるまで、キャリブレーションのステップサイズを下方に調整します。新しいプロファイルウィザードを使用して構成を設定した場合、調整ステップサイズの適切な開始値が既に設定されています。 RAと赤緯のステップ数が大幅に異なる場合は、2つの軸で異なるガイド速度設定を使用していない限り、赤緯のバックラッシュの証拠が表示されている可能性があります。
● 直交性エラー-カメラの軸は垂直である必要がありますが、通常は独立して計算されます。角度の計算には大きな精度は必要ありませんが、それらが著しく非直交である場合は、キャリブレーションを繰り返す必要があります。このタイプの反復アラートが表示され、軸が著しく非直交である場合は、問題を特定して修正する必要があります。一般的な原因は、極の位置合わせ不良、大きな偏角バックラッシュ、またはRAの大きな周期的エラーです。これらの問題のいずれかが原因で、PHD2が他の軸での動きを測定しようとしているときに、ガイド星が1つの軸で大きく動く可能性があります。これらの問題が疑われる場合は、先に進んでキャリブレーションを受け入れてから、ガイディングアシスタントを実行して、極の位置合わせエラー、偏角バックラッシュ、およびRAトラッキングエラーを測定します。他の場合では、マウントがまったく動いていない可能性があり、測定された星の変位は、単に見た目の影響によって引き起こされます。この種の問題は、ダイアログの左側のキャリブレーショングラフで明らかになります。軸エラーが比較的小さく、ハードウェアが適切に動作していると確信している場合は、[詳細設定]ダイアログの[ガイド]タブでオプションを[RAに直交すると仮定する]にオプションを設定することで、このタイプのアラートを回避できます。ただし、これはエラーがかなり小さい場合にのみ行う必要があります。それ以外の場合は、深刻な問題を単に無視しています。
● 疑わしいRAおよびDecレート-マウントによって報告されたガイドスピードが正確であると仮定すると、測定された赤経のガイドレートは、ほぼ赤道(赤緯)の係数で赤緯ガイドレートに関連付けられます。つまり、スコープをポールに近づけると、見かけのRAレートは小さくなります。 PHD2は、どのレートが正しくないかを特定しようとはしません。単にレートに問題があるように見えることを警告するだけです。自分でこれらのレートを簡単に確認できます。 1X恒星速度でガイドする場合、赤緯ガイド速度は約15秒/秒でなければなりません。 0.5X恒星のガイドレートの場合、赤緯率は7.5 arc-sec / secなどになります。RA率よりも大幅に小さい赤緯率は、多くの場合、大きな赤緯の反発を示しています。このアラートをトリガーしたキャリブレーションを使用すると、実際のガイドレートが測定されたものよりもおそらく大きいため、12月のガイドでオーバーシュートが発生する可能性があります。この問題を回避するには、キャリブレーションを開始する前に手動でDecバックラッシュをクリアする必要があります。これは、2つの方法のいずれかで実行できます。1)マウントの最後の旋回方向が北であることを確認するか、2)ハンドコントローラーを使用して、マウントをガイド速度で10〜20秒間手動で北に移動します。
● 一貫性のない結果-キャリブレーション結果が最後に使用したキャリブレーションと大幅に異なる場合、アラートメッセージが生成されます。これは、構成に変更を加えたために発生する可能性があります。これは実際の問題を意味するものではありませんが、新しい構成用に別のプロファイルを作成することを検討する必要があります。そうすることで、PHD2は各プロファイルの設定を記憶し、プロファイルを簡単に切り替えることができます。構成を変更していない場合は、おそらく結果がそれほど異なる理由を特定する必要があります。
● 東または南の動きが少なすぎる-キャリブレーションプロセスでは、西と北の動きのみを使用して、カメラの角度と動きの速度を計算します。東と南への移動は、主にガイドスターを開始位置の近くのどこかに復元するために行われます。東または南の動きがほとんどまたはまったく見られない場合、状況を通知する警告メッセージが表示されることがあります。キャリブレーションは失敗していませんが、ガイドが損なわれている可能性があります。最も一般的な原因は、ST-4ガイドを使用している場合のガイドケーブルの不良、またはアラートが南方向の移動に関連している場合の非常に大きな偏角バックラッシュです。
これらのアラートのいずれかを使用すると、関連するデータフィールドがメッセージのタイプに基づいて強調表示されます。 警告を無視する(「キャリブレーションを受け入れる」(Accept calibration))、キャリブレーションを再実行する(「キャリブレーションを破棄する」(Discard calibration))、または最後の適切なキャリブレーションを復元する(「古いキャリブレーションを復元する」(Restore old calibration))かを選択できます。 3番目のオプションでは、後で校正を延期し、最後の適切な校正データでガイドを開始できます。 同じトピックに関するアラートが繰り返し表示され、問題がないと確信している場合は、[表示しない]チェックボックスを使用して、そのタイプの今後のアラートをブロックできます。 ただし、PHD2で使用される健全性チェックはさまざまな機器で適切に機能し、ほとんどのユーザーはこれらの調整アラートをまったく表示しません。
偏角バックラッシュ
キャリブレーションの問題の最も一般的な原因は偏角バックラッシュで、これはほとんどのギア付きマウントにある程度存在します。 しかし、安価なマウントが多数あると、問題が深刻になり、キャリブレーションとガイドの結果が不十分になる可能性があります。 次のキャリブレーションレビューダイアログの例を考えてみます。
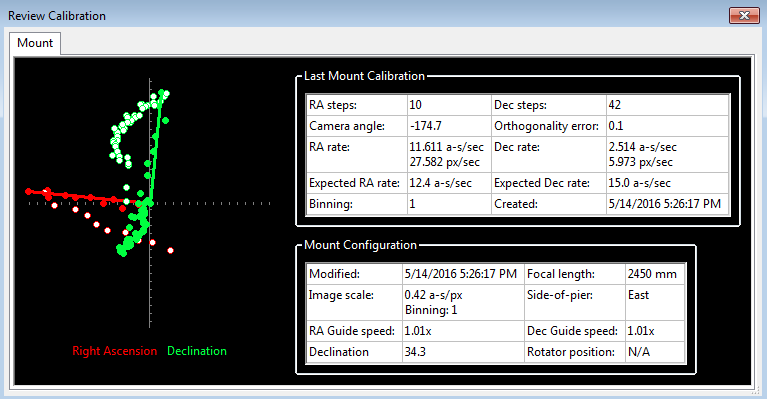
この問題の最初の手がかりは、2つの軸のキャリブレーションに必要なステップ数を比較することでわかります。RAの場合は10、12月の場合は42です。これは、おそらくバックラッシュが解消されなかったため、マウントが偏角で一貫して移動していなかったことを示しています。これは、ガイドコマンドが北から南に逆にされたときの赤緯ポイント(薄緑)の「さまよう」動作も説明します。最後に、2つの軸のガイド速度設定が同じであっても、計算された偏角率はRA率よりもはるかに小さくなります。実際、これにより、調整アラートダイアログがトリガーされます。ここで対処すべき問題は2つあります。まず、キャリブレーション結果は不十分であり、偏角ガイドレートのより正確な測定値を得るために繰り返す必要があります。 2つ目は、赤緯の方向が逆転しているときに、10進のガイドレートが正しい場合でも、マウントが正しく動作しない可能性があります。メインウィンドウで一貫した星の動きが見られるまで、最初にマウントをガイド速度で10〜20秒間手動で北に動かすと、キャリブレーションを改善できます。これを行うには、「手動ガイド」ツールを使用するか、マウントのハンドコントローラーを使用します。これが完了すると、マウントの偏角バックラッシュのほとんどが克服されます。その後、キャリブレーション手順を繰り返し、おそらくより妥当な偏角誘導率を取得できます。根本的なバックラッシュの問題は、通常、マウントを機械的に調整する必要があります。マウントが1x恒星に近いガイド速度を使用していない場合は、マウントガイドの速度を上げることで、すぐに改善することができます。 PHD2バックラッシュ補正設定を使用することもできますが、バックラッシュが大きい場合(たとえば、3秒を超える場合)、これはうまく機能しない可能性があります。バックラッシュを修正できないか、管理可能なレベルに減らすことができない場合は、偏角に対して単方向ガイドを選択することを検討してください。これを行うには、極の位置合わせエラーが原因でマウントがどのようにドリフトするかを特定し、PHD2に反対方向にのみガイドするように指示します(単一方向ガイドを参照)。これは、詳細ダイアログの「アルゴリズム」タブにある「Decガイドモード」(Dec guide mode)コントロールで制御されます。たとえば、マウントが全体的に北にドリフトする傾向がある場合は、ガイドコマンドを南のみに制限します。これは理想的なソリューションではありませんが、明らかに長い露出を使用して良好なガイド結果を得ることができます。多くのイメージャがこのアプローチを選択しています。偏角コントロールがまったくないマウントなど、異常な状況の場合は、[Decガイドモード]の選択を[オフ]に設定できます。
基本的なマウント制御の検証―スタークロステスト
警告メッセージが表示されずに調整が完了する問題が繰り返し発生する場合は、非常に簡単なテストを実行して、マウントがガイドコマンドに応答しているかどうかを確認する必要があります。 このテストは基本的にキャリブレーション中に行われることを模倣しますが、より直接的で何が行われているのかをよりよく感じることができます。 これを「スタークロス」テストと呼びます。 メインイメージングカメラのシャッターを開き、フィールド内の星に特徴的なクロスパターンをトレースさせるガイドコマンドを送信するというアイデアです。 つまり、次のような画像を取得したいとします。

角度の向きは関係ありません。これは、ガイドカメラを回転させる方法の関数です。 重要なのは、十字の線が垂直で、中心の開始点を基準にして4つの方向のそれぞれの長さがほぼ等しいことです。 取得した画像がこのおおよその外観でない場合、ガイドが損なわれるか、おそらく不可能になります。 たとえば、次の悪い結果を考えます。

星が1つの軸のみに沿って移動したことがわかります-この例では、赤経のみです。 マウントに送信された赤緯ガイドコマンドは何もしませんでした。 これがマウントで修正されるまで、赤緯をガイドすることができなくなり、キャリブレーションを完了するために赤緯ガイドを無効にする必要があります。 悪い結果には他にも多くの組み合わせがあり、それぞれがマウント、ガイドケーブル、またはマウント用のASCOMドライバーの特定の問題を示唆しています。 PHD2とは何の関係もないことは間違いありません。
テストを実行する手順は次のとおりです。
1. マウントガイドの速度を1倍速に設定します。 PHD2の「手動ガイド」ツールを起動し、初期パルスサイズを選択します。たとえば、5秒から始めます。
2. メインカメラで60秒の露光を開始します。
3. 5秒のパルスを西に送信し、次に2つの5秒のパルスを東に送信し、最後の5秒のパルスを西に送信します。 これにより、星がおおよその開始位置に戻ります。 各ガイドパルスを送信した後、次のパルスを送信する前にコマンドが完了するまでの時間を5秒ほど待つ必要があります。
4. 5秒のパルスを北に送信し、次に5秒のパルスを2つ南に送信し、最後に5秒のパルスを北に送信します。 これにより、星は再び開始位置に戻ります。
5. メインのカメラ画像がダウンロードされ、何が表示されるかを待ちます。
必要に応じて、異なるパルス長を使用できます。おそらく、より小さい値を使用して、マウントがそれらに応答することを確認します。 メインイメージングカメラの総露光時間が、ガイドの合計時間と誤差のマージンよりも長いことを確認してください。 ほとんどのマウントでは、多少の偏角があるため、星は正確な中心に戻りません。最初の画像の例でそれを確認できます。 しかし、それはかなり接近している必要があります。そうしないと、マウント内にある赤緯のバックラッシュの量をより注意深く調べる必要があります。 PHD2には、ここで説明するスタークロステストツールもあります。スタークロスツール。 これを使用して、上記の1-5で説明したテスト手順を自動的に実行できます。
このテストを使用する利点の1つは、物事を絶対的な基本にまで減らすことです。マウントが指示どおりに動くかどうか。 PHD2ガイドの設定はテストに関与していないため、PHD2ガイドの設定とは関係ありません。 テスト結果を使用して、マウントの製造元や、マウントのタイプとその一般的な問題を理解している他のユーザーと連絡を取ると役立つ場合があります。
マウント動作の測定
適切なガイド結果が得られない場合、最初の本能は、魔法の解決策を見つけるために、ガイドパラメータを大幅に変更することです。 これはほとんど機能せず、状況を悪化させる可能性が高くなります。 new-profile-wizardのデフォルトのパラメーターで妥当な結果が得られない場合、障害はおそらくハードウェアにあり、根本的な原因を特定する必要があります。 原因を理解すれば、実際の修理ができなくても、おそらくガイド結果を改善できますが、根本的な問題を理解することが重要です。 マウントの動作を理解するには、次の手順を実行します。
1. new-profile-wizardを使用して、テスト用の新しい機器プロファイルを作成します。ガイドスコープの焦点距離とカメラのピクセルサイズが正しいことを確認してください。それらを推測しないでください。わからない場合は調べてください。
2. マウントへのASCOM接続が使用可能な場合はそれを使用し、マウントガイドの速度を0.5x-1x siderealに設定します。マウントにあるバックラッシュ補正を無効にします。
3. 1〜2秒の露出を使用し、PHD2がDec = 0の近くでガイド星を自動選択し、スコープが地平線から少なくとも45度上を向くようにして、影響を最小限に抑えます。
4. ガイドアシスタントを10〜15分間実行し、特にmin-move値に関して推奨事項を適用します。赤緯の反動を測定してみましょう。プロセスのこの部分でガイド星が失われないように、大きな追跡領域を使用する必要がある場合があります。追跡用の長方形に複数の星がないことを確認してください。バックラッシュテストは星を北に遠くに移動するので、十分なスペースを確保するために、カメラフレームの南端に近いガイド星を選択します。
5. GAセッション中の様子を観察します。マウントをぶつけたり、何か異常なことが起こった場合は、テストを停止してから再起動してください。目標は、正常に動作しているときのパフォーマンスを測定することです。
6. ガイドアシスタントが推奨する範囲を超えて、ガイドパラメーターを変更しないでください。
7. ガイディングアシスタントの表に示されている結果を注意深く確認します。テーブルの各エントリは、マウントのパフォーマンスについて役立つ情報を提供します。これらの結果はガイドログにも書き込まれるため、後の分析に利用できます。
8. 手順3で調整警告メッセージが表示された場合は、先に進む前にこれらの問題を解決する必要があります。不適切なキャリブレーションをガイドしても、良い結果は得られません。また、極の位置合わせエラーが10分以上の場合は、それを改善してから上記の手順を繰り返す必要があります。
9. PHD2をさらに10〜15分間ガイドし、風やその他の「間違い」による大きなエラーがない限り、PHD2を稼働させます。これが行われている間は、ガイドパラメータを変更しないでください。
結果を自分で分析する場合は、PHDLogViewツールと、PHD2ガイド結果の分析に関するチュートリアルを使用してください。 PHD2のベストプラクティスに関するドキュメントも参照してください。 これらの参照はすべて、OpenPHDGuiding.org Webサイトの「News」タブから入手できます。 結果を理解するための支援が必要な場合は、ガイドログファイルとデバッグログファイルの両方をOpenPHD2 Googleフォーラムに投稿してください。喜んでお手伝いします。
表示ウィンドウの問題
新しいユーザーは、メインウィンドウに表示される画像が非常にうるさいか、ほとんど真っ白または真っ黒であるとよく不満を言います。カメラが機能していて実際に画像をダウンロードしていると仮定すると、表示の問題はフレームに使用可能な星がないことが原因であることがよくあります。たとえば、屋内または日光の下でカメラをテストしようとすると、ほとんどの場合、これらの状態が発生します。これらの状況での画像表示ウィンドウの外観は、有用な情報を提供していないため、割引する必要があります。 PHD2は、夜の空の下で実際の星を見るのを助けることを目的とした自動スクリーンストレッチ機能を使用しています。星が存在しない場合、ディスプレイは引き伸ばされて、フレーム内にあるものの最小値から最大値までの明るさの値の範囲が表示されます。これが通常、ノイズの多い/すべて白/すべて黒の表示結果を引き起こす原因です。ガイダーが十分にフォーカスされていない場合にも、表示の問題が発生する可能性があります。ガイダーに焦点を合わせるのは退屈なプロセスになる可能性がありますが、良い指導結果を得るためには重要です。良いテクニックは、明るく不飽和の星から始めて、それに焦点を合わせようとすることです。次に、PHD2スタープロファイルツールを使用して焦点の位置を微調整するために、次第に暗い星に移動し、ガイド星のサイズを測定します。他のアプリケーションでは、バーティノフ焦点マスクまたは焦点ツールを使用して、良好な結果を得ることができます。適切なフォーカス位置に到達する限り、何を使用してもかまいません。
ホットピクセルとスター選択の問題
ほとんどのガイドカメラでは、ホットピクセルの塊がPHD2によってガイド星と間違われるという問題が発生する可能性があります。自動化ツールを使用していて、「自動選択」ガイドの星の選択がホットピクセルを誤って選択している場合、これは特に煩わしい場合があります。多くのカメラでは、ホットピクセルの問題を軽減または排除するには単純なダークフレームで十分であり、常にダークフレームを開始点として使用する必要があります。ただし、他のカメラの場合、不良ピクセルの場所とサイズの変化を確認したら、不良ピクセルマップを作成し、必要に応じて更新する必要があります。カメラセンサーは時間の経過とともに変化し、温度の変化に反応する可能性があるため、不良ピクセルマップのメンテナンスは、実行したい小さなタスクです。ステップバイステップの説明は、このドキュメントの「不良ピクセルマップ」の章にあります。これらの問題は、センサーへの宇宙線の衝突によって引き起こされる可能性のある一時的なホットピクセルとは異なります。宇宙線のヒットはガイドを混乱させる可能性がありますが、それらについてできることは本当にほとんどありません。
PHD2にガイドスター(「自動選択」)を選択させることをお勧めします。そのため、利用可能なUIコントロールを使用して、PHD2が可能な限り最良の仕事を行えるようにする必要があります。 Advanced DialogのGuidingタブのMinimum-HFDプロパティは、ホットピクセルの選択を回避するためのおそらく最も効果的なツールです。その値を設定して、セットアップで生成できる最小で最も暗い実際のスターを使用できるようにする必要があります。システムの正当なガイド星の妥当なサンプルを測定するには、星形プロファイルツールを使用する必要があります。次に、Minimum-HFD値を設定して、これらの星を受け入れる一方で、本当にセンサーの欠陥である小さな明るいスポットを排除します。スケールの反対側では、システムが提供する最も明るいピクセル値、つまり彩度を表すADU値も指定する必要があります。これを行うことで、PHD2が平坦なプロファイルを持っているが実際には飽和していない星を拒否することを防ぎます。彩度コントロールは、[詳細設定]ダイアログの[カメラ]タブにあり、「「スター飽和検出」」(Star Saturation Detection)というラベルの付いたコントロールグループの一部です。 「飽和による最大ADU値」(Saturation by Max-ADU value)のオプションを選択し、システムに値を設定します。 8ビットカメラを使用している場合、飽和は約255ですが、16ビットカメラは約65000 ADUで飽和します。正しい値がわからない場合は、明るい星にスコープを向け、数秒のガイドカメラ露出を使用して、もう一度[星のプロファイル]ウィンドウを確認します。そのウィンドウに表示されるものの1つは「ピーク値」です。これは最も明るいピクセルのADU値であり、飽和点の設定に使用するものです。これらの両方のコントロールを使用すると、PHD2ガイド星の選択にはるかに優れた結果が得られる可能性があります。
作業ベースラインの復元
反対のアドバイスにもかかわらず、パフォーマンスが同じままであるか、さらには悪化していることに気づくために、ガイディングパラメーターに情報のない迅速な変更を加えた可能性があります。 続行する前に、設定をデフォルト値に復元する必要があります。 new-profile-wizardを使用してプロファイルを作成した場合、パラメーターは構成の詳細に基づいて設定されているため、かなり近いと思われます。 これらの設定を使用して重大なガイドの問題が発生した場合は、マウントまたはその他のハードウェアに問題がある可能性があります。 盲目的にガイドパラメータを変更しても、これらの問題はほとんど解決されず、事態が悪化することがよくあります。設定をデフォルト値に戻すには、いくつかのオプションがあります。
1. 詳細ダイアログの「アルゴリズム」タブで、各フィールドのツールチップを確認することにより、パラメーターを個別にリセットできます。マウスカーソルをフィールドの上に置くと、デフォルト値が表示されます。これは、イメージのスケールに依存するmin-move設定では正確ではないことに注意してください。このアプローチは、いくつかの設定のみを復元する場合に最適です。
2. 選択したRAおよびDecガイドアルゴリズムの[アルゴリズム]タブの[リセット]ボタンをクリックします。これは、すべてのガイドパラメーターをリセットするための推奨アプローチです。 min-move設定は、new-profile-wizardによって最初に計算された値にリセットされます。その後、ガイディングアシスタントを実行してこれらの設定を調整した場合は、そのプロセスを繰り返す必要があります。
3. 「接続」ダイアログの「プロファイルの管理」ボタンをクリックしてアクセスするnew-profile-wizardを実行します。既存の同じカメラとマウントの選択肢を使用し、プロファイルに新しい名前を付けます。古いプロファイルのダークライブラリと不良ピクセルマップを再利用する場合は、新しいプロファイルに接続し、[ダーク]メニューを使用して、古いプロファイルからそれらのファイルをインポートします。新しいプロファイル設定に満足したら、古いプロファイルを削除できます。
カメラのタイムアウトとダウンロードの問題
場合によっては、ガイダーイメージがダウンロードまたは表示されないという問題が発生することがあります。極端な場合、これによりPHD2または他のカメラ関連のアプリケーションが応答しなくなる(つまり、「ハングする」)ことがあります。繰り返しますが、これはほとんどの場合、ハードウェア、カメラドライバー、または接続の問題が原因です。最も一般的な原因の1つは、USBケーブルまたはデバイスの不良です。 PHD2などのアプリケーションが原因である可能性は非常に低いため、システムのより低いレベルから調査を開始する必要があります。まず、ガイドカメラが機能していることを確認します。カメラからコンピュータへの短い直接ケーブルを使用して、カメラに付属のネイティブまたはテストアプリケーションで露出を試します。カメラが機能している場合は、USBハブとケーブルを調べ、一度に1つずつ交換して、問題を特定できるかどうかを確認できます。私たちがイメージングを行う間、私たちは敵対的な環境で作業することを覚えておく価値があります。使用するコンポーネントの多くは、寒い屋外条件向けに設計されていません。したがって、先週または先月だけで機能していたものは、もはや信頼できない可能性があります。
2.3リリース以降、PHD2はカメラのタイムアウトプロパティを使用してハング状態から保護します。このプロパティは、[詳細設定]の[カメラ]タブで設定されます。 15秒のデフォルト値を使用します。つまり、PHD2は、露光が完了してからカメラから画像を受け取るまで最大15秒待機します。これは非常に長い時間であり、ほとんどのカメラで問題なく動作します。ただし、一部のカメラは、USBサブシステムに大きな帯域幅や電力を要求することによって問題を引き起こすことが知られています。この種のタイムアウトが発生し、カメラが正常に動作していると確信している場合は、このタイムアウト値を増やすことができます。タイムアウトエラーが表示されないように、1000秒以上の非常に大きな値に変更することもできます。そうすることで、ユーザーインターフェースの明らかなハングや不安定なガイド動作の影響を受けやすくなりますが、これは自分で選択できる選択肢です。タイムアウトの値を大きくしても、通常のカメラ操作中に余分な遅延が発生することはありません。カメラから画像がダウンロードされると、タイマーがキャンセルされ、ガイドがすぐに続行されます。
PHD2サポートフォーラムに投稿されている、これらの種類の問題を特定するのに役立ついくつかの診断手順を次に示します。
カメラのタイムアウトは、システムの最下位レベルの問題によって必ず発生します。ホストコンピューターのUSBサブシステム、互換性のないUSB3 / USB2接続、破損または低品質のUSBケーブル、または不安定なカメラドライバー。問題が何であるかを確認するには、おそらくいくつかのシナリオを検討する必要があります。幸いにも、これは通常、カメラを連続露光モードにして実行させることにより、日中に行うことができます。イメージングカメラとガイドカメラだけを接続することから始めます。これらはUSBサブシステムの2人の最も重いユーザーになるためです。はじめに、USB-2カメラがコンピュータのUSB-3ポートに接続されている場合、問題が発生することがよくあります。これらは下位互換性があると想定されていますが、これはハードウェアレベルでのみ可能です。ドライバの実装に悪影響が及ぶ可能性があります。確認する領域は2つあります。1)USBトラフィックと帯域幅、2)カメラへの電力供給です。メインのイメージングカメラにはおそらく独自の電源がありますが、ガイドカメラなどの他のデバイスはUSBケーブルを介して電力が供給される場合があります。その場合は、電源付きUSBハブを使用してカメラに電力を供給してみてください。また、24AWGの電源導体を備えた高品質のUSBケーブルを使用し、USBケーブルの延長やUSBエクステンダーを排除することも最善です。 USBトラフィックに問題があると思われる場合は、他にも試してみてください。
1. コンピューターがAC電源で動作していることと、OSが節電のためにUSBポートを無効にできないことを確認してください。 イメージを作成している間は、リソースを大量に消費する他のアプリケーションを実行しないでください。
2. ガイドカメラをビンにして、ダウンロードしたガイダー画像のサイズを縮小します
3. カメラドライバーがそのオプションをサポートしている場合、カメラのUSB使用制限を調整します
4. PHD2でサブフレームを使用する
5. Windowsを実行している場合は、Microsoftツールを使用して、さまざまなUSBポートがコンピューターのUSBコントローラーにどのように関連付けられているかをマッピングできます。 次に、2つのカメラを別々のUSBバスに分離してみます。
6. 使用可能な場合は、別のカメラドライバー(ASCOMドライバーなど)を使用してみます
不十分なガイド性能
すべてを実行し終えたら、おそらくすぐにかなり良いガイド結果が得られます。あなたは「十分に良い」の意味を決定する必要があり、誰の基準も異なる可能性があります。しかし、星が縞模様または細長いために画像の結果が許容できない場合は、問題を修正するために体系的なアプローチを取る必要があります。多くの場合、物事をより良くするために、さまざまなガイドパラメータを盲目的に調整し始めるのは魅力的です。パラメータの調整には何の問題もありません。それがパラメーターが存在する理由です。しかし、パラメーターの機能と解決しようとしている問題の理解に基づいて慎重に行う必要があります。 PHD2のデフォルト設定は、ほとんどのアマチュア機器と場所で妥当な結果が得られるように慎重に選択されています。最適な設定は、イメージスケール、表示条件、および特定のマウントの動作に完全に依存しています。つまり、これらは状況に固有のものです。正しいガイドパラメータの魔法の「レッドブック」はなく、他のユーザーから取得した設定は、状況とはまったく関係がない場合があります。 new-profile-wizardを使用して始めた場合、デフォルトの設定は画像のスケールに一致するようにかなりうまく調整されています。ガイディングアシスタントを使用することで、状況の詳細を確認できます。つまり、視界の状態がどのように見えるか、最小移動の設定を調整して、視界を追うことを回避できます。ガイディングアシスタントまたは手動ガイディングツールを使用して、マウントに存在するバックラッシの量を確認することもできます。これは、偏角誘導の結果を理解するために重要です。
可能な限り最高のガイドパフォーマンスを達成することは、複雑な作業であり、ここで扱うことはできません。 ただし、さまざまなソースからWebでヘルプを入手できます。Craig Starkによるドキュメントは、開始するのに非常に適しています。
警告メッセージ
PHD2は、メインディスプレイウィンドウの上部にアラートメッセージを表示することがあります。 これらは通常、注意が必要なエラーまたは診断情報を示します。 通常の操作では、おそらくこれらのいずれも表示されませんが、表示された場合、このセクションは、それらの対処方法を決定するのに役立ちます。
暗いライブラリと不良ピクセルマップのアラート
ダークライブラリまたは不良ピクセルマップを使用する-ダークライブラリまたは不良ピクセルマップを使用すると、PHD2が誤ってホットピクセルやその他の画像の欠陥をスターとして識別してしまう可能性が低くなります。このメッセージを無視することを選択した場合、PHD2が誤ってガイドスターからホットピクセルに切り替わり、正しくガイドされなくなる状況に対して脆弱になります。
フォーマット/ジオメトリの不一致-ダークフレームと不良ピクセルマップは、使用されているカメラのセンサーのフォーマットと一致している必要があります。既存のプロファイルでカメラを変更した場合、既存のdark / bpmファイルは使用できなくなり、この警告メッセージが表示されます。メッセージが表示されないようにするには、カメラを変更するときに代わりに新しいプロファイルを作成する必要があります。新しいダークまたはbpmを撮影する必要がありますが、元のカメラで使用するために古いファイルを保持できます。非常にまれな状況で、カメラを処理するためのドライバーまたはPHD2コードが変更されたときに、このメッセージが表示されることがあります。センサーの形式が異なるフレームが何らかの形で蓄積されている古いダークライブラリがある場合は、形式に互換性がないという警告メッセージが表示されることもあります。
これらのいずれの場合でも、ダークライブラリまたは不良ピクセルマップを最初から再構築する必要があります。詳細については、こちらをご覧ください:ダークフレームと不良ピクセルマップ
ASCOMアラート
マウント、カメラ、またはその他のASCOM制御デバイスに初めて接続すると、必要な機能がドライバーでサポートされていないことを示す警告メッセージが表示される場合があります。 1つの例は、古いドライバーで発生する可能性がある、ASCOMテレスコープ/マウントドライバーによるパルスガイドのサポートの欠如です。 これらの状況では、ASCOMドライバーを更新するのが唯一の手段です。 これらのドライバーは通常、ASCOM Webサイトから、または場合によってはデバイスの製造元から入手できます。 原則として、ベストプラクティスは、これらのドライバーの最新バージョンを使用することです。これにより、すでに修正されている問題が発生することはありません。
マウントのASCOMドライバーに関連する他の警告メッセージが表示されることもあります。
1. 「マウントするためのPulseGuideコマンドが失敗しました」-ガイドが効果的でない可能性があります。」これは通常、ASCOMマウントドライバーのバグまたはタイミングの感度が原因で発生します。通常、ガイドコマンドが適切に実行されたかどうかを知る方法はありません。アラートがほとんど表示されず、ガイドの結果が許容できる場合は、おそらく無視できます。警告状態にもかかわらず、PHD2はガイドコマンドを発行し続けるので、すぐにアクションを実行する必要はありません。アラートが頻繁に表示される場合は、デバッグログを送信してください。問題の詳細を理解し、ASCOMドライバーの作成者に説明できるようにします。
2. 「ガイディングが停止しました:スコープが回転し始めました。」これは一目瞭然ですが、スコープが回転していたという決定は、ASCOMマウントドライバーによってPHD2に報告されるものです。実際に旋回していたかどうかは、PHD2にはわかりません。ガイドをアクティブにして誤ってスコープをスルーしなかったとすると、おそらくドライバーにタイミングの問題があります。問題を一時的に回避したい場合は、ロジックを無効にして回転をチェックできます。脳のダイアログの[ガイド]タブに移動し、[マウントスルー時にガイドを停止する]チェックボックスをオフにします。これでガイドを続けることができますが、結果は疑わしいかもしれません。デバッグログは、ASCOMドライバーの作成者に問題を説明するために必要な詳細を提供する必要があります。
カメラタイムアウトアラート
カメラのタイミング/タイムアウトの問題に関連するアラートメッセージについては、ここで説明しています:カメラのタイムアウト
キャリブレーションアラート
マウントの調整プロセス中に、いくつかのアラートが表示される場合があります。 これらはここで説明されています:キャリブレーションアラート
最大期間制限アラート
通常のガイド中に、RAまたはDecの最大時間制限の設定が原因で、PHD2がガイドスターをロックしたままにできないという警告メッセージが表示される場合があります。これらのパラメータをデフォルト値から減らした場合は、デフォルト値に戻す必要があります。ただし、制限が1秒を大幅に超えている場合、このアラートはおそらく、修正が必要な機械的な問題が発生したことを示しています。最も単純なケースでは、ケーブルの障害、突風、マウントバンプ、またはその他の外部イベントにより、ガイドスターが大きく移動した可能性があります。このような場合は、問題を修正してガイドを進めることができます。しかし、他の場合では、アラートは、まったく修正されていない、着実に成長しているガイド星の変位によってトリガーされる場合があります。たとえば、PHD2がマウントを北または南方向に正しく移動できない場合、未修正の累積エラーは最終的にアラートをトリガーするポイントに到達します。または、「子午線反転後のDecの逆出力」([高度なダイアログ/ガイド]タブ)の設定が正しくないため、「暴走」Decガイディングが発生する場合があります。これらの種類の問題は、何らかの診断が必要であり、単純に最大期間の制限を増やしても効果がありません。
ログ分析
あらゆる種類の問題の分離または調整では、常にPHD2ログファイルを使用する必要があります。 どちらも人間の読者が簡単に解釈できるようにフォーマットされており、ガイドログは他のアプリケーションに簡単にインポートできるように構成されています。 「ツール」セクションで述べたように、PHDLogViewerやExcelなどのアプリケーションを使用して、全体的なパフォーマンスを視覚化し、パフォーマンス統計を計算し、ガイドに問題があった期間を調べることができます。 Excelまたは同様のアプリケーションでは、ガイドログで列の区切り文字としてカンマを使用するように指定するだけです。
ガイドの内容
ガイドログの内容は、新しい機能が追加されるたびに進化していきます。 しかし、基本的なコンテンツは安定しており、それを解析するアプリケーションを「壊さない」ようにかなりの注意が払われています。 自分でログを分析する場合は、次の情報が役立ちます。
PHD2ガイドログには、0個以上のキャリブレーションシーケンスと0個以上のガイドシーケンスが含まれます。 これらの各セクションには、使用されているガイドアルゴリズムとPHD2がガイドのために使用する内部パラメーターに関するほとんどの情報を提供するヘッダーがあります。 キャリブレーション実行またはガイドシーケンスの開始時に、ヘッダー情報の最後の行で列見出しのセットを定義します。 これらの列の意味を以下に示します。
キャリブレーション列:
l dx、dyは、カメラ座標系での開始位置からのオフセット(ピクセル単位)です。
l x、yは、各キャリブレーションステップの終了時のガイド星のカメラのx / y座標です。
l 距離はカメラ座標系で移動した合計距離です(dist = sqrt(dx * dx + dy * dy))これは、PHD2がキャリブレーションパラメーターを計算するために使用する値です
ガイド列:
l dx、dyはキャリブレーションの場合と同じ-カメラ座標系でのガイド星の「ロック位置」からのオフセット
l RARawDistanceおよびDECRawDistance-これらはdxおよびdyのマウント座標への変換です。つまり、ガイドカメラの任意の角度を使用して、カメラのX / YからマウントのRA / Decにマッピングします。
l RAGuideDistanceおよびDECGuideDistance-これらは、さまざまなガイドアルゴリズムからの出力です。ガイドアルゴリズムは「生の」距離で動作し、望遠鏡の位置を各軸で調整する必要がある場合、その距離を決定します。たとえば、「最小移動」パラメータセットを使用すると、「未加工」距離がゼロ以外の場合でも、「ガイド」距離をゼロにすることができます。
l RADuration、RADirection、DECDuration、DECDirection-これらは、上記の2つの「ガイド」距離によって決定される値です。 「期間」は、RAGuideDistanceおよびDECGuideDistanceで指定された距離だけマウントを移動するために必要なガイドパルスの長さ(ミリ秒単位)です。
l XStep、YStep-補償光学デバイスが使用されている場合の補償光学デバイスのステップ調整期間
l StarMass-ガイド星の画像の明るさの目安
l SNR-PHD2によって使用される内部の「星検出比」-基本的に、星と空の背景をどの程度区別できるかを示す尺度
l ErrorCode-ガイド星測定の品質を表す整数値:
¡ 0-エラーなし
¡ 1-星は飽和しています
¡ 2-星のSNRが低い
¡ 3-星の質量が低すぎて正確な測定ができません
¡ 4-星がフレームの端に近すぎた
¡ 5-星の質量が指定された量を超えて変化しました
¡ 6-予期しないエラー
すべての距離の値はピクセル単位です。 ガイドセクションのヘッダーには、PHD2で認識されている画像のスケールが表示され、必要に応じてピクセル距離の値を秒角の単位にスケーリングするために使用できます。
問題の報告
PHD2に固有のアプリケーションの問題が発生した場合は、open-phd-guiding Googleグループ(https://groups.google.com/forum/?fromgroups=#!forum/open-phd-guiding)に報告することをお勧めします。 ガイド。 明らかに、提供できる情報が多いほど、問題を解決できる可能性が高くなります。 次のガイドラインを使用すると、その点で役立ちます。
1. 問題の再現を試みます-明確な一連の手順がある場合は、すぐに解決策を見つける可能性が高くなります。 それを再現できる場合は、最小限のステップ数に減らすようにしてください。 自分で再現しようとすると、ハードウェアやコンピュータの環境がなくなります。
2. 構成の説明を完全にするようにしてください-オペレーティングシステム、機器の種類、PHD2バージョンなど
3. 問題が発生したセッションのPHD2デバッグログを添付します。 DocumentsフォルダーのPHD2フォルダーにデバッグログがあります。 問題を再現できない場合は、最初に問題が発生した時刻を推定してみてください。これにより、何百行もの出力をふるい分けすることなく、デバッグログで証拠を見つけることができます。 「ヘルプ」メニューの「ログファイルのアップロード」機能は、ログファイルを見つけてアップロードするのに役立ちます。